Device Manager (fcfDevmgr)¶
The Device Manager (fcfDevmgr) provides the functionality for supervision and management of a configurable set of devices.
The Device Manager provides a library of devices implementing the communication with the respective device controllers in the PLC. Devices are created at the manager start-up by a device factory class. The main components of the Device Manager server are:
State Machine engine based on SCXML and implemented in RAD. It contains a set of action and activity classes.
A Device Factory class that creates the instances of all device classes at start-up and based on the server configuration.
A set of Device classes. Each device has two additional classes: one for the device configuration and the other one for the interface with the Local Control System (LCS).
A Facade class that manages the interface between the state machine engine and the device classes.
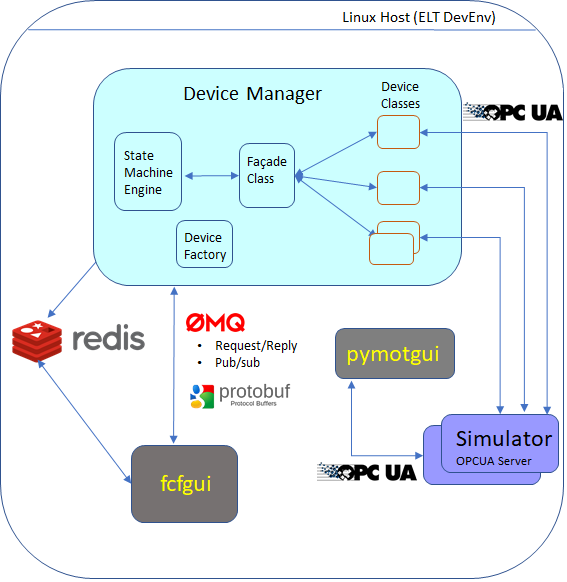
Device Manager Components without LCS.¶
Client applications, such as fcfGui, send commands to the Device Manager using the CII MAL library (request/reply). The fcfGui reads the information about the devices from the Redis DB using polling.
The Device Manager uses the Redis Database to store run-time information about itself and about the devices it controls. In absence of a Local Control System, device classes can connect to the Device Simulator via the OPC-UA protocol, see figure above.
In normal operation, device classes connect to the OPC-UA server running under the Windows OS side of the Beckhoff IPC, e.g .CX2030. This communication is based on the execution of RPC calls (OPC-UA Method profile). Each Device Controller running in the TwinCAT PLC declares a number of methods defining the interface with the Device Manager. Additionally, the device classes subscribe to the status data produced by the device controllers. Each time the status changes, the device classes are notified and they updates the Redis DB and publish the corresponding changes via CII (pub/sub).
The PLC OPC-UA Server connects to the device controllers via the vendor specific protocol (ADS). The device controllers trigger the changes in the hardware via the TwinCAT I/O mapping.
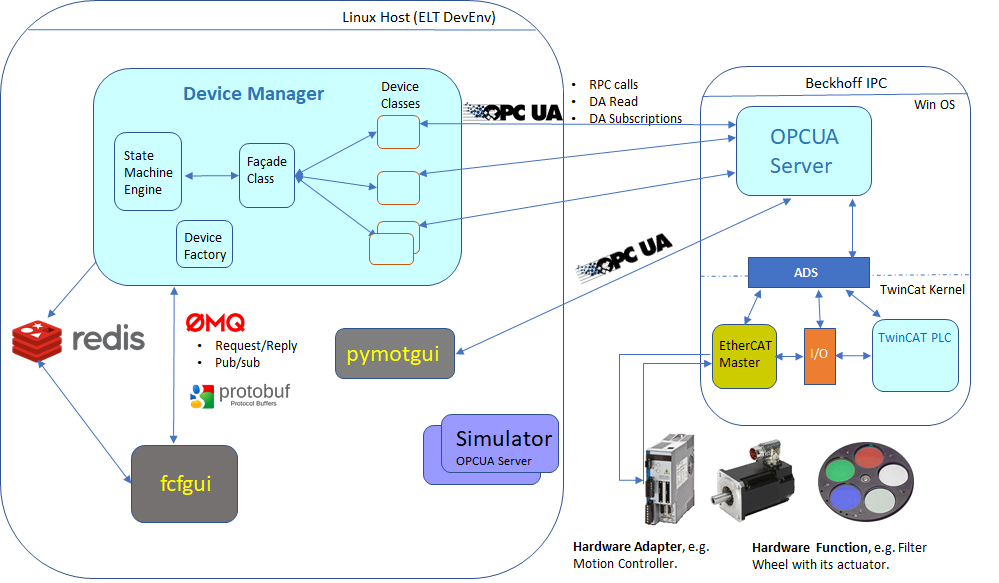
Device Manager connecting to a Beckhoff IPC.¶
Supported Devices¶
Shutters¶
The Shutter device is a general purpose device for controlling a shutter hardware function. The device can control the shutter open/close.
Lamps¶
The Lamp device is a general purpose device for controlling a lamp hardware function. The device can switch a lamp on/off, control the intensity and handle warm-up and cool-down times when this is supported.
Motors¶
The Motor device is a general purpose device that controls different types of motors. It provides the following features:
Support three different axis types: Linear, Circular and Circular-Optimized.
Note
Circular-Optimized means that the motor will always take the shorter path to reach the target position.
Definition of named positions in user units (UU) or encoder values.
Arbitrary positioning given in user units or encoder values.
Positioning in absolute or relative units.
Support for configurable Initialization Sequence.
Support for SW limits.
Support for various timeouts.
Auto disabling when standing.
Support for brake handling.
Support for backlash compensation.
IODev¶
The IODev device is a generic Input/Output control device that can be customized for specific applications not already covered by other devices. It can be configured with a variable number of channels. The IODev device supports three different input channel types: Digital input, Analog input and Integer input. And three different output channel types: Digital output, Analog output and Integer output.
Sensors¶
The Sensor is a IODev device configured only for monitoring signals. The Sensor device supports three different channel types: Digital input, Analog input and Integer input.
Derotators¶
The Derotator device is an aggregated motor device that continuously adapt its position according to the field or pupil rotation. It supports four different modes:
Stationary: Derotator moves to a target position based on the position angle and remains standstill after reaching the target.
Sky: The Derotator is continuously moving to compensate the field rotation.
Elevation: The Derotator is continuously moving to compensate the pupil rotation.
User: The Derotator is continuously moving according to a customized computation of the position defined by the user.
ADCs¶
The ADC device manages the position of two prisms with the aim of correcting for the atmospheric dispersion.
The device supports two modes:
Auto: The ADC is continuously positioning the two motors based on the telescope RA/DEC, the environmental parameters and the ADC configuration.
Off: The ADC moves to a target position and remains standstill after reaching the target.
Piezos¶
The ‘Piezo’ device manages the control of the output signals of a piezo hardware. It supports up to three axes. The device can be set in two modes:
Auto: The Piezo is correcting continuously the outputs based on the feedback signals.
- Pos: The Piezo set the output of the axes to a fixed value. In this mode, the Piezo can
be controlled in user positions (normally volts) or directly in bits.
Actuator¶
The Actuator device is a general purpose device for controlling actuators through a switch signal (on/off). The most common use of actuators is for power control.
SmarAct¶
These are motor devices handled by a SmarAct controller type.
Device Manager State Machine¶
The Device Manager uses a state machine described in a SCXML format that is
interpreted by the state machine engine provided by the rad application framework.
(SCXML specification).
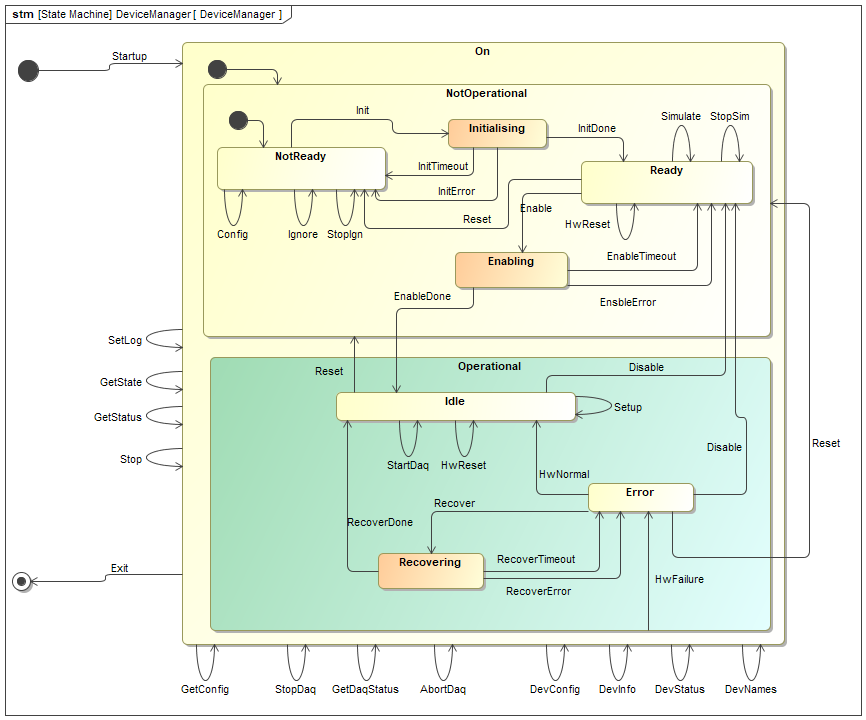
Device Manager State Machine Diagram.¶
Off –> NotReady, event: Startup
The Device Manager starts up and goes automatically to NotOperational/NotReady. Main server objects are instantiated including the basic application that uses the State Machine engine. The Device Manager reads its own configuration and completes its initialisation.
NotReady –> Ready, event: Init
The server connects to each of the device controllers through the device objects. Depending on the device configuration, it establishes the connection to the real HW or to the simulator. If any of the device objects fails to establish the connection, the server will remain in substate NotReady.
NotOperational/Ready –> Operational/Idle, event: Enable
The Device Managers goes through the Enabling state. If Device Controllers are already Operational, the Device Manager does not affect their state and goes immediately to the Operational state. If Device Controllers are not operational, Device Manager will trigger the events (via OPC-UA method calls) to reach the operational state for each of the local devices under the manager control. If it does not succeed within the defined timeout (configuration parameter, see CII Configuration Service (config-ng)), it will reply with a failure remaining in NotOperational/Ready state. During the transition from NotOperational/Ready to Operational/Idle, the Device Manager downloads the configuration to each Device Controller. If at least one Device Controller cannot reach the Operational state, the Device Manager will remain in state NotOperational/Ready.
Operational/Idle –> Operational/Error, event: HwFailure
Problems in at least one of the managed devices will bring the Device Manager into the Error state (Operational/Error). A typical example would be when the PLC, running the Device Controller, is power-cycled.
Operational/Error –> Operational/Idle, event: HwNormal
In the situation when an error condition is recovered, the Device Manager will go back automatically to Operational/Ready state (event HwNormal). For instance, if the network connection is lost, the Device Manager will go to Error but when the network is restored, the Device Manager will update its state automatically.
Operational –> NotOperational/Ready, event: Disable
The Device Manager disables the operation of devices but the state of controllers is not affected. If the state of the controllers is to be changed to NotReady, this has to be done separately. The reason for the above is to avoid affecting the state of the controllers by changing the state of the manager and thus achieve minimal impact on the hardware. In case of error going from Operational to NotOperational/Ready, the end state will be nevertheless NotOperational/Ready.
NotOperational/Ready –> NotOperational/NotReady, event Reset
The subscription to the OPC-UA server is stopped and the sessions of the managed devices are disconnected. In case of error going from Ready to NotReady, the end state will be nevertheless NotReady.
Extract of the current State Machine specification for the Device Manager.
<state id="On">
<initial>
<transition target="NotOperational"/>
</initial>
<state id="NotOperational">
<initial>
<transition target="NotReady"/>
</initial>
<state id="NotReady">
<transition event="Events.Reset" target="NotReady">
<customActionDomain:ActionReset name="ActionReset"/>
</transition>
<transition event="Events.Init" target="Initialising"/>
<transition event="Events.Config">
<customActionDomain:ActionConfig name="ActionConfig"/>
</transition>
</state>
<state id="Initialising">
<onentry>
<customActionDomain:ActionInitStart name="ActionInitStart"/>
</onentry>
<invoke id="ActivityInitialising"/>
<transition event="Events.InitDone" target="Ready">
<customActionDomain:ActionInitDone name="ActionInitDone"/>
</transition>
<transition event="Events.InitError" target="NotReady">
<customActionDomain:ActionInitError name="ActionInitError"/>
</transition>
Command Line Arguments¶
Command line argument help is available under the option --help.
--server-id ARG| -i ARG(string)Server id. If not specified uses the one included in the configuration file.
--config ARG| -c ARG(string)Application configuration file (see fcf_device_config_ref for more details about the server configuration).
--log-level ARG| -l ARG(enum) [default: ERROR]Log level to use. One of ERROR, INFO, DEBUG, TRACE.
--log-prop-file ARG| -l ARG(string)Log property file.
--req-endpoint ARG| -l ARG(string)Server MAL Req/Rep endpoint (zpb.rr://<ipaddr>:<port>/).
Environment Variables¶
$CFGPATHUsed to resolve configuration file paths.
$DATAROOTSpecifies the default root path used as output directory for FITS metadata. Metadata files are stored under $DATAROOT/fcf/<fcs instance>.
Configuration¶
CII Configuration Service (config-ng)¶
The FCF in version 4.0.0 has been ported to the CII config-ng library. Unlike yaml-cpp, this library allows to define type information for the configuration parameters. The FCF has included a predefined set of configuration definitions. These files are part of the FCF configuration and can be found in the fcf/server/resources/config directory. This config directory contains the following subdirectories:
definitions: it contains the basic types for the server and devices.
mapping: it contains the instances of the mapping files for each device type.
devices: it contains examples of configuration for each device type.
server: it contains an example of the configuration for the server.
You can find more information about CII config-ng in the following link. (Config-ng manual).
Warning
Please note that due to the porting to the CII config service, all applications shall be updated accordingly.
Device Manager Configuration¶
The server configuration is a set of files written in yaml format.
(YAML specification). YAML is easy to read format
that has been adopted by the CII configuration service.
Many resources about YAML can be found on the web. One could also validate the format online, see http://yaml.org/spec/
The CII config-ng defines a set of yaml custom tags for defining types, e.g.
!cfg.type:int32 defines an integer parameter. Applications can define additional
types. The FCF has defined a number of types including one per device.
Note
The entry point for the Device Manager configuration is the file that contains the server configuration and the mapping to the device configuration files. The configuration of each device should be given in a separate file for better readability and maintenance. Each device type uses the corresponding mapping file that defines the real names of the attributes in the OPC-UA address space.
Config Item |
Type |
Optional |
Default |
Description |
|---|---|---|---|---|
server::server_id |
string |
no |
This is the id associated with the specific server. |
|
server::req_endpoint |
string |
no |
This is the endpoint for CII MAL request/reply. The server will listen to incoming commands using this endpoint. |
|
server::pub_endpoint |
string |
no |
This is the endpoint for CII MAL pub/sub. The server will publish its status using this endpoint. |
|
server::db_timeout |
double |
yes |
2000 [ms] |
This is the timeout for connecting to the Redis DB. Unit is milliseconds. |
server::log_properties |
string |
log4cplus property file to be used by the server. |
||
server::scxml |
string |
no |
This is the state machine specification file used by the server. |
|
server::fits_prefix |
string |
no |
This is the prefix to be used for the INS meta-data. |
|
server::oldb_prefix |
string |
no |
This is the prefix to be used for the DB. This prefix is meant to identify uniquely a given system, e.g. micado. |
|
server::req_timeout |
double |
yes |
2000 [ms] |
General command timeout for sending commands to the Local Control System (LCS). Unit is milliseconds. |
server::mon_timeout |
double |
yes |
1000 [ms] |
General timeout for monitoring. Unit is milliseconds. |
server::dictionaries |
string |
no |
Vector of dictionaries to be used by the server. |
|
server::devices |
devices |
no |
This is a vector of devices which are active in the server configuration. Only devices listed here will be managed by the server. |
Each element in the device vector has the following attributes:
name
This is the device name.
cfgfile
Configuration filename for a device.
type
Device type.
An example of a server configuration is provided below.
# server definition
!cfg.include fcf/devmgr/definitions/server.yaml:
server: !cfg.type:FcfServer
server_id : 'fcs1'
req_endpoint : "zpb.rr://127.0.0.1:12082/"
pub_endpoint : "zpb.ps://127.0.0.1:12345/"
db_endpoint : "127.0.0.1:6379"
db_timeout : 2000
scxml : "fcf/devmgr/server/sm.xml"
dictionaries : ["dictionary/dit/stddid/primary.did.yaml", "dictionary/fcf/devmgr/server/fcf.did"]
log_properties : "fcf/devmgr/server/log_properties.cfg"
fits_prefix : "INS1"
oldb_prefix : "ins8"
req_timeout : 300000
devices : [
{
name: 'shutter1',
type: Shutter,
cfgfile: "fcf/devmgr/devices/shutter1.yaml"
},
{
name: 'lamp1',
type: Lamp,
cfgfile: "fcf/devmgr/devices/lamp1.yaml"
},
{
name: 'actuator1',
type: Actuator,
cfgfile: "fcf/devmgr/devices/actuator1.yaml"
},
{
name: 'motor1',
type: Motor,
cfgfile: "fcf/devmgr/devices/motor1.yaml"
},
{
name: 'piezo1',
type: Piezo,
cfgfile: "fcf/devmgr/devices/piezo1.yaml"
},
{
name: 'sensor1',
type: Sensor,
cfgfile: "fcf/devmgr/devices/sensor1.yaml"
},
{
name: 'adc1',
type: Adc,
cfgfile: "fcf/devmgr/devices/adc1.yaml"
},
{
name: 'drot1',
type: Drot,
cfgfile: "fcf/devmgr/devices/drot1.yaml"
}
]
Device Base Configuration¶
Each device has a common set of configuration parameters.
<device id>::type
It specifies the type of the device. Valid types are: Shutter, Lamp, Motor, IODev, SmarAct, Drot, Adc, Piezo and Actuator.
<device id>::interface
It defines the communication interface that will be used by the device. At present, the only valid value is: Open62541. This is the name of the OPC-UA toolkit used to communicate to the LCS (PLC). The needed libraries are included in the installation of the ELT standard machine.
<device id>::identifier
It defines the OPC-UA object identifier.
<device id>::namespace
It defines the OPC-UA address space number.
<device id>::prefix
It defines the prefix for the OPC-UA address space nodeId of the device.
<device id>::simulated
Flag indicating if device is simulated.
<device id>::ignored
Flag indicating if the device is ignored. When a device is ignored, the device will ignore most of the commands received by the server until it receives the stop ignoring command (StopIgn).
<device id>::dev_endpoint
It defines the endpoint of the OPCUA server for the device controller. If several devices share the same endpoint, only one connection will be established.
Note
address has been renamed to dev_endpoint in version 4.0.0.
<device id>::sim_endpoint
It defines the endpoint of the OPCUA server for the device simulator.
Note
simaddr has been renamed to sim_endpoint in version 4.0.0.
<device id>::mapfile
File providing the configuration of the attributes in the OPC address space per each of the supported device types.
An example of a mapping file configuration is included below.
!cfg.include fcf/devmgr/definitions/shutterMap.yaml:
Shutter: !cfg.type:ShutterMap
cfg:
low_closed: cfg.bActiveLowClosed
low_fault: cfg.bActiveLowFault
low_open: cfg.bActiveLowOpen
low_switch: cfg.bActiveLowSwitch
ignore_closed: cfg.bIgnoreClosed
ignore_fault: cfg.bIgnoreFault
ignore_open: cfg.bIgnoreOpen
initial_state: cfg.bInitialState
timeout: cfg.nTimeout
stat:
state: stat.nState
substate: stat.nSubstate
local: stat.bLocal
error_code: stat.nErrorCode
rpc:
rpcInit: RPC_Init
rpcEnable: RPC_Enable
rpcDisable: RPC_Disable
rpcClose: RPC_Close
rpcOpen: RPC_Open
rpcStop: RPC_Stop
rpcReset: RPC_Reset
Note
With the information contained in the mapping file, combined with the PLC prefix and the namespace, the device obtains the NodeId for each of the attributes and the RPCs defined in the ICD with the device controller. NodeIds are assuming to have string format. Other NodeId formats are currently not supported.
<device id>::fits_prefix
Prefix used by the device when generating the metadata information. This data is included in the FITS file generated by the server at the end of the exposure.
Shutter Specific Configuration¶
The Shutter device defines a set of configuration parameters that will be transferred
to the device controller running in the LCS (PLC). All these parameters are under the
ctrl_config heading.
Warning
The ctrl_config parameters are downloaded to the device controller when the device is not Operational. If the controller is already Operational, the user shall force the transition from Operational to NotOperational/NotReady and back to Operational.
Config Item |
Type |
Optional |
Default |
Description |
|---|---|---|---|---|
ctrl_config::low_closed |
bool |
yes |
false |
If true, the closed signal is active low. |
ctrl_config::low_fault |
bool |
yes |
false |
If true, the fault signal is active low. |
ctrl_config::low_open |
bool |
yes |
false |
If true, the open signal is active low. |
ctrl_config::low_switch |
bool |
yes |
false |
If true, the switch signal is active low. |
ctrl_config::ignore_closed |
bool |
yes |
false |
If true, the closed signal is ignored. |
ctrl_config::ignore_fault |
bool |
yes |
false |
If true, the fault signal is ignored. |
ctrl_config::ignore_open |
bool |
yes |
false |
If true, the open signal is ignored. |
ctrl_config::initial_state |
bool |
yes |
false |
If true, the initial state for shutter will be open. |
ctrl_config::timeout |
uint |
yes |
3000 [ms] |
Shutter timeout for transitions. Unit is milliseconds. |
An example of a shutter configuration is given below.
!cfg.include fcf/devmgr/definitions/shutter.yaml:
# Please note some parameters are inherited and therefore not defined here.
shutter1: !cfg.type:Shutter
identifier: PLC1 # OPCUA Object Identifier
prefix: MAIN.Shutter1 # OPCUA attribute prefix
simulated: true
dev_endpoint: opc.tcp://134.171.59.98:4
sim_endpoint: opc.tcp://127.0.0.1:7576 # Simulation address
fits_prefix: "SHUT1"
ctrl_config: !cfg.type:ShutterController
initial_state: false # If T, initial state is open
Lamp Specific Configuration¶
The Lamp device defines a set of configuration parameters that will be transferred
to the device controller running in the LCS (PLC). All these parameters are under the
ctrl_config heading.
Warning
The ctrl_config parameters are downloaded to the device controller when the device is not Operational. If the controller is already Operational, the user shall force the transition from Operational to NotOperational/NotReady and back to Operational.
Config Item |
Type |
Optional |
Default |
Description |
|---|---|---|---|---|
ctrl_config::low_fault |
bool |
yes |
false |
If true, the fault signal is active low. |
ctrl_config::low_on |
bool |
yes |
false |
If true, the on signal is active low. |
ctrl_config::low_switch |
bool |
yes |
false |
If true, the switch signal is active low. |
ctrl_config::ignore_fault |
bool |
yes |
false |
If true, the fault signal is ignored. |
ctrl_config::invert_analog |
bool |
yes |
false |
If true, the analog feedback is active. |
ctrl_config::initial_state |
bool |
yes |
false |
If true, the initial state will be switched on. |
ctrl_config::analog_threshold |
int |
yes |
0 [bits] |
Analog feedback signal threshold |
ctrl_config::analog_range |
uint |
yes |
32767 |
Full range of A/D converter for analog output. |
ctrl_config::cooldown |
uint |
yes |
0 [s] |
Cooldown time. Unit is seconds. |
ctrl_config::maxon |
uint |
yes |
0 [s] |
Maximum time for the lamp to be On. If value is zero means no maximum is defined. Unit is seconds. |
ctrl_config::warmup |
uint |
yes |
0 [s] |
Warmup time. Unit is seconds. |
ctrl_config::timeout |
uint |
yes |
3000 [ms] |
Lamp timeout for transitions. Unit is milliseconds. |
An example of a lamp configuration is given below. This configuration file can be found in module devmgr/server
!cfg.include fcf/devmgr/definitions/lamp.yaml:
# Please note some parameters are inherited and therefore not defined here.
lamp1: !cfg.type:Lamp
identifier: PLC1 # OPCUA Object Identifier
prefix: MAIN.Lamp1 # OPCUA attribute prefix
dev_endpoint: opc.tcp://134.171.59.98:4840
sim_endpoint: opc.tcp://134.171.12.182:4840
fits_prefix: "LAMP1"
ctrl_config:
initial_state: false # If T, initial state is on
IODev Specific Configuration¶
The iodev devices defines currently no configuration that will be downloaded to the LCS. However, it defines the configuration of the iodev channels. The sensor channels are known only at the server side.
Config Item |
Type |
Optional |
Default |
Description |
|---|---|---|---|---|
norpc |
bool |
yes |
false |
Flag to indicate that the device does not support RPCs. This means, no RPC calls to change the state will be executed. This flag is used for special devices running in commercial controllers not running in a PLC but having an embedded OPC-UA server. To be used only in special cases. |
sensor |
bool |
yes |
false |
Flag to indicate that the iodev is a sensor device. When this flag is active, the iodev only monitors input channels. This is the most typical usage of the iodev device. |
ctrl_config::timeout |
uint |
yes |
3000 [ms] |
Sensor timeout for transitions. Unit is milliseconds. |
channels |
channels |
no |
na |
List of channels. |
Each channel contains the following configuration parameters:
Config Item |
Type |
Optional |
Default |
Description |
|---|---|---|---|---|
name |
string |
no |
“” |
Channel name. |
description |
string |
yes |
“” |
Channel description. |
type |
string |
no |
na |
Channel type. Allowed types for input channels:
Allowed types for output channels:
|
header |
bool |
yes |
true |
If true, the channel will be included in the metadata FITS file. |
log |
bool |
yes |
true |
If true, the sensor value will be logged (Not available yet !). |
map |
string |
no |
na |
Channel internal mapping to the name in the LCS. |
named_values |
vector |
no |
na |
Vector of pair name/values. Named values associate specific sensor raw values to names. |
prefix |
string |
no |
na |
Channel FITS prefix. |
unit |
string |
yes |
na |
Channel unit. |
Warning
The channels parameter has been modified in version 4.0.0 with the porting to the CII config-ng.
An example of a sensor configuration is given below. This configuration file can be found in module devmgr/server. In this case, the sensor device has two channels: ch1 and ch2.
!cfg.include fcf/devmgr/definitions/sensor.yaml:
# Please note some parameters are inherited and therefore not defined here.
sensor1: !cfg.type:Sensor
identifier: PLC1
prefix: MAIN.IODev1
dev_endpoint: opc.tcp://134.171.59.98:4840
sim_endpoint: opc.tcp://134.171.57.209:4840
fits_prefix: "SENSOR1"
ctrl_config:
timeout: 20000
channels: [
{
name: ch1,
description: "channel1",
fits_prefix: "CH1 STAT",
type: DI,
header: true,
log: true,
unit: mm,
map: di1,
named_values: [
{
name: 'HIGH',
value: '1'
},
{
name: 'LOW',
value: '0'
}
]
},
{
name: ch2,
description: "channel2",
fits_prefix: "CH2 STAT",
type: DI,
header: true,
log: true,
unit: dd,
map: di2
}
]
Motor Specific Configuration¶
The Motor device defines a set of configuration parameters that will be transferred
to the device controller running in the LCS (PLC). These parameters are under the
ctrl_config heading. The motor initialisation sequence will be also downloaded to
the LCS.
The motor also defines a set of configuration parameters that are only known at the server level, for instance the named positions of the motor.
Tolerance of the named position in user units (UU). If the actual position is within the tolerance, the device will report the named position otherwise its name will be empty.
Warning
The ctrl_config parameters are downloaded to the device controller when the device is not Operational. If the controller is already Operational, the user shall force the transition from Operational to NotOperational/NotReady and back to Operational.
Config Item |
Type |
Optional |
Default |
Description |
|---|---|---|---|---|
axis_type |
string |
yes |
LINEAR |
Axis type. Allowed options are: LINEAR, CIRCULAR and CIRCULAR_OPT. |
tolerance |
double |
yes |
1 [uu] |
Tolerance of the named position in user units (UU). If the actual position is in the tolerance, the device will report the named position otherwise its name will be empty. |
positions |
positions |
no |
na |
Vector of named positions, see description below. |
initialisation |
steps |
no |
na |
Vector of initialisation steps, see description below. |
ctrl_config::min_pos |
double |
yes |
0 [uu] |
Minimum position in user units. |
ctrl_config::max_pos |
double |
yes |
0 [uu] |
Maximum position in user units. |
ctrl_config::velocity |
double |
yes |
1.0 [uu/s] |
Default velocity for moving the motor in position mode |
ctrl_config::active_low_lstop |
bool |
yes |
false |
If true, the Lower Stop signal is active low. |
ctrl_config::active_low_lhw |
bool |
yes |
false |
If true, the Lower Hw signal is active low. |
ctrl_config::active_low_ref |
bool |
yes |
false |
If true, the Reference signal is active low. |
ctrl_config::active_low_index |
bool |
yes |
false |
If true, the Index signal is active low. |
ctrl_config::active_low_ustop |
bool |
yes |
false |
If true, the Upper Stop signal is active low. |
ctrl_config::active_low_uhw |
bool |
yes |
false |
If true, the Upper Hw signal is active low. |
ctrl_config::exec_pre_init |
bool |
yes |
false |
If true, the pre-init execution is activate |
ctrl_config::exec_post_init |
bool |
yes |
false |
If true, the post-init execution is activate. |
ctrl_config::exec_pre_move |
bool |
yes |
false |
If true, the pre-move execution is activate. |
ctrl_config::exec_post_move |
bool |
yes |
false |
If true, the post-move execution is activate. |
ctrl_config::low_brake |
bool |
yes |
false |
If true, the Brake signal is active low. |
ctrl_config::low_inpos |
bool |
yes |
false |
If true, the In Position signal is active low. |
ctrl_config::backlash |
double |
yes |
0 [uu] |
Backlash compensation. If value is zero means no backlash compensation is active. |
ctrl_config::disable |
bool |
yes |
false |
If true, the power of the motor will be disabled after positioning. |
ctrl_config::lock |
bool |
yes |
false |
If true, the motor position will be locked |
ctrl_config::lock_pos |
double |
yes |
0 [uu] |
Position that will be locked in case lock configuration is activated. |
ctrl_config::lock_tolerance |
double |
yes |
0 [us] |
Tolerance of the lock position |
ctrl_config::init_timeout |
int |
yes |
60000 [ms] |
Motor initialisation timeout. Unit is milliseconds. |
ctrl_config::move_timeout |
int |
yes |
60000 [ms] |
Motor move timeout. Unit is milliseconds. |
ctrl_config::switch_timeout |
int |
yes |
150000 [ms] |
Motor timeout for going out of the switch during initialisation. Unit is milliseconds. |
Note
An optional parameter in this context means that FCF provides a default value in the parent device type configuration. This default value will be used unless users redefine it in the device instance configuration.
Motor Initialisation¶
Note
The motor has a set of configuration parameters dedicated to the motor initialisation sequence. The initialisation sequence is downloaded to the LCS only when device controller is not operational.
step
Step name.
value1
Parameter 1 of the initialisation step.
value2
Parameter 2 of the initialisation step.
Note
In case parameters are not applicable (na) please use 0 instead, for instance END, 0, 0
Step |
Description |
Parameter 1 |
Parameter 2 |
|---|---|---|---|
END |
Finish the sequence, no more actions are performed. |
na |
na |
FIND_INDEX |
Motor moves until finding the index pulse. |
Fast velocity [UU/s] |
Slow velocity [UU/s] |
FIND_REF_LE |
Motor moves until finding lower edge of reference switch. |
Fast velocity [UU/s] |
Slow velocity [UU/s] |
FIND_REF_UE |
Motor moves until finding upper edge of reference switch. |
Fast velocity [UU/s] |
Slow velocity [UU/s] |
FIND_LHW |
Motor moves until finding lower hardware limit. |
Fast velocity [UU/s] |
Slow velocity [UU/s] |
FIND_UHW |
Motor moves until finding upper hardware limit. |
Fast velocity [UU/s] |
Slow velocity [UU/s] |
DELAY |
Motor wait for a fixed amount of time before to continue. |
time in [ms] |
na |
MOVE_ABS |
Motor moves to an absolute position. |
Velocity [UU/s] |
Target position [UU] |
MOVE_REL |
Motor moves to a relative position. |
Velocity [UU/s] |
Target position [UU] |
CALIB_ABS |
Motor calibrates an absolute position. |
Position [UU] |
na |
CALIB_REL |
Motor calibrates a relative position. |
Position [UU] |
na |
CALIB_SWITCH |
Motor calibrates switch position. |
Position [UU] |
na |
Note
Some of the initialisation steps require parameters, for instance the speed of the motor. These parameters are defined together with the initialisation step.
Named Positions¶
The motor device supports a configuration of named positions that associate specific motor position in user units (UU) to names. The aim of name positions is to facilitate the setting of motor positions by end users.
name
Position name.
value
Value of the position name in user units (UU).
Note
An example of a motor configuration is given below. This configuration file can be found in module devmgr/server.
!cfg.include fcf/devmgr/definitions/motor.yaml:
# Please note some parameters are inherited and therefore not defined here.
motor1: !cfg.type:Motor
identifier: PLC1 # OPCUA Object Identifier
prefix: MAIN.Synchro1 # OPCUA attribute prefix
dev_endpoint: opc.tcp://134.171.59.98:4840
sim_endpoint: opc.tcp://134.171.57.209:4840 # Simulation address
fits_prefix: "MOT1"
ctrl_config:
velocity: 3.0
min_pos: 0.0
max_pos: 359.0
active_low_ref: true
active_low_uhw: true
initialisation: [
{
step: 'FIND_LHW',
value1: 4.0,
value2: 4.0
},
{
step: 'FIND_UHW',
value1: 4.0,
value2: 4.0
},
{
step: 'CALIB_ABS',
value1: 0.0,
value2: 0.0
},
{
step: 'END',
value1: 0.0,
value2: 0.0
}
]
positions: [
{
name: 'ON',
value: 30
},
{
name: 'OFF',
value: 100
}
]
Derotator Specific Configuration¶
As for other devices, the Derotator device defines a set of configuration
parameters that will be transferred to the device controller running in the LCS
(PLC). All these parameters are under the ctrl_config heading.
Since the Derotator is just an aggregated motor device, it includes all Motor configuration parameters (see fcf_devmgr_motor_config_ref) plus a few parameters specific to derotators.
Warning
The ctrl_config parameters are downloaded to the device controller when the device is not Operational. If the controller is already Operational, the user shall force the transition from Operational to NotOperational/NotReady and back to Operational.
Config Item |
Type |
Optional |
Default |
Description |
|---|---|---|---|---|
ctrl_config::dir_sign |
int |
yes |
1 |
Motor direction sign |
ctrl_config::focus_sign |
int |
yes |
-1 |
Focus direction sign. |
ctrl_config::trk_period |
int |
yes |
20 [ms] |
Period of the tracking corrections within the PLC. |
ctrl_config::stat_ref |
double |
yes |
0.0 [uu] |
Reference position for stationary mode. |
ctrl_config::sky_ref |
double |
yes |
0.0 [uu] |
Reference position for sky mode. |
ctrl_config::user_ref |
double |
yes |
0.0 [uu] |
Reference position for user mode. |
ctrl_config::user_par1 |
double |
yes |
0.0 |
Specific parameter 1 for user mode. |
ctrl_config::user_par2 |
double |
yes |
0.0 |
Specific parameter 2 for user mode. |
ctrl_config::user_par3 |
double |
yes |
0.0 |
Specific parameter 3 for user mode. |
ctrl_config::user_par4 |
double |
yes |
0.0 |
Specific parameter 4 for user mode. |
Note
An example of a Derotator configuration is given below. This configuration file can be found in module devmgr/server.
!cfg.include fcf/devmgr/definitions/drot.yaml:
# Please note some parameters are inherited and therefore not defined here.
drot1: !cfg.type:Drot
identifier: PLC1 # OPCUA Object Identifier
prefix: MAIN_FAST.drot # OPCUA attribute prefix
dev_endpoint: opc.tcp://134.171.59.98:4840
sim_endpoint: opc.tcp://134.171.57.209:4840 # Simulation address
fits_prefix: "DROT1"
initialisation: [
{
step: 'END',
value1: 0.0,
value2: 0.0
}
]
positions: [
{
name: 'ON',
value: 30
},
{
name: 'OFF',
value: 100
}
]
ctrl_config:
velocity: 3.0
active_low_ref: true
active_low_uhw: true
Note
The derotator uses Circular Optimize (CIRCULAR_OPT) as axis type. In this axis mode you have to reset the software limits to zero or simply not define them.
Derotator Control¶
Operation modes¶
Alias |
Name |
Description |
|---|---|---|
eng |
Engineering |
In this mode, the Derotator behaves like a standard motor. This means that it can be moved in user units and encoders. |
stat |
Stationary |
In this mode, the Derotator is stationary and it can be positioned at given angle according to the following formula: pos := stat_ref + dir_sign * (posang)/2.0; |
sky |
Sky |
The Derotator tracks following the field rotation. fieldRotation := parallactic - focus_sign * altitude; pos := sky_ref + dir_sign * (posang - fieldRotation)/2; angleOnSky := posang; modeAngle := angleOnSky; |
elev |
Elevation |
The Derotator tracks following the pupil rotation. pos := elev_ref + (focus_sign * dir_sign * altitude) /2.0; angleOnSky := parallactic; modeAngle := angleOnSky; |
user |
User |
The Derotator tracks according to the user custom computation. |
ADC Specific Configuration¶
As for other devices, the ADC device defines a set of configuration
parameters that will be transferred to the device controller running in the LCS
(PLC). These parameters are under the ctrl_config heading. Considering that
the ADC is a multi-axis device, it includes as well the configuration of two
standard motor devices. The configuration of each motor device is defined
in separate files and they correspond to the configuration of a standard motor
device (see fcf_devmgr_motor_config_ref).
Warning
The ctrl_config parameters are downloaded to the device controller when the device is not Operational. If the controller is already Operational, the user shall force the transition from Operational to NotOperational/NotReady and back to Operational.
Config Item |
Type |
Optional |
Default |
Description |
|---|---|---|---|---|
ctrl_config::motors |
vector |
no |
Vector of motors controlled by the ADC. See the table below. |
|
ctrl_config::trk_period |
int |
yes |
20 [ms] |
Period of the tracking corrections within the PLC. |
ctrl_config::pslope |
double |
yes |
0.0023 [arcsec/mbar] |
Pressure slope. |
ctrl_config::poffset |
double |
yes |
743.0 [mbar] |
Pressure offset. |
ctrl_config::tslope |
double |
yes |
-0.0061 [arcsec/C] |
Temperature slope. |
ctrl_config::toffset |
double |
yes |
12 [C] |
Temperature offset. |
ctrl_config::afactor |
double |
yes |
3.32 [1/arcsec] |
A Factor |
ctrl_config::zdlimit |
double |
yes |
0.0174533 |
Zenith distance limit |
ctrl_config::minelev |
double |
yes |
27.64 [deg] |
Minimum Elevation. |
ctrl_config::mot1_signoff |
int |
yes |
1 |
Motor 1 sign for off mode |
ctrl_config::mot1_signauto |
int |
yes |
1 |
Motor 1 sign for auto mode |
ctrl_config::mot1_signphi |
int |
yes |
1 |
Motor 1 sign for phi |
ctrl_config::mot1_refoff |
double |
yes |
0 [deg] |
Motor 1 offset for off mode |
ctrl_config::mot1_refauto |
double |
yes |
0 [deg] |
Motor 1 offset for auto mode |
ctrl_config::mot1_coffset |
double |
yes |
1.7387 [arcsec] |
Motor 1 C parameter |
ctrl_config::mot1_poffset |
double |
yes |
90 [deg] |
Motor 1 Position offset |
ctrl_config::mot1_drotfactor |
double |
yes |
2 |
Motor 1 derotator offset |
ctrl_config::mot2_signoff |
int |
yes |
1 |
Motor 2 sign for off mode |
ctrl_config::mot2_signauto |
int |
yes |
1 |
Motor 2 sign for auto mode |
ctrl_config::mot2_signphi |
int |
yes |
1 |
Motor 2 sign for phi |
ctrl_config::mot2_refoff |
double |
yes |
0 [deg] |
Motor 2 reference position for off mode |
ctrl_config::mot2_refauto |
double |
yes |
0 [deg] |
Motor 2 reference position for auto mode |
ctrl_config::mot2_coffset |
double |
yes |
1.7387 [arcsec] |
Motor 2 C parameter |
ctrl_config::mot2_poffset |
double |
yes |
90 [deg] |
Motor 2 Position offset |
ctrl_config::mot2_drotfactor |
double |
yes |
2 |
Motor 2 derotator offset |
Each element in the motor vector has the following parameters:
Config Item |
Type |
Optional |
Default |
Description |
|---|---|---|---|---|
name |
string |
no |
Name of the motor configuration. |
|
prefix |
string |
no |
Internal name used by the ADC for motor1 (fixed) |
|
cfgfile |
string |
no |
File path for the motor configuration. |
|
Note
An example of an Adc configuration is given below. This configuration file can be found in module devmgr/server.
!cfg.include fcf/devmgr/definitions/adc.yaml:
# Please note some parameters are inherited and therefore not defined here.
adc1: !cfg.type:Adc
identifier: PLC1 # OPCUA Object Identifier
prefix: MAIN_FAST.adc # OPCUA attribute prefix
dev_endpoint: opc.tcp://134.171.59.98:4840
sim_endpoint: opc.tcp://134.171.57.209:4840 # Simulation address
fits_prefix: "ADC1"
ctrl_config:
motors: [
{
name: 'adc1_motor1',
prefix: "motor1",
cfgfile: "fcf/devmgr/devices/adc1Motor1.yaml"
},
{
name: 'adc1_motor2',
prefix: "motor2",
cfgfile: "fcf/devmgr/devices/adc1Motor2.yaml"
}
]
ADC Control¶
Operation modes¶
The ADC operates two motorized functions. In engineering mode, each motor can be controlled independently.
Alias |
Name |
Description |
|---|---|---|
eng |
Engineering |
In this mode, the ADC behaves like the standard motor. This means that each motor can be moved in user units and encoders. |
off |
Off |
In this mode, the ADC is stationary and it can be positioned at given angle according to the following formula: pos := off_ref + sign_off * posang; |
auto |
Auto |
The ADC tracks following the default formula. This formula can be replaced by the user in order to accommodate instrument specific requirements. |
Piezo Specific Configuration¶
The Piezo device defines a set of configuration parameters that will be transferred
to the device controller running in the LCS (PLC). All these parameters are under the
ctrl_config heading.
Warning
The ctrl_config parameters are downloaded to the device controller when the device is not Operational. If the controller is already Operational, the user shall force the transition from Operational to NotOperational/NotReady and back to Operational.
Config Item |
Type |
Optional |
Default |
Description |
|---|---|---|---|---|
ctrl_config::num_axes |
short |
no |
3 |
Configured number of piezo axes. This parameter gives flexibility to adapt to different type of piezos. |
ctrl_config::max_on |
int |
yes |
0 |
Maximum time that outputs will be maintained. If it is zero means there is no time counter. |
ctrl_config::full_range[] |
short |
yes |
32767 |
Full range per axes in bits. |
ctrl_config::home[] |
double |
yes |
0 |
Home position per axes in user units. |
ctrl_config::lower_limit[] |
double |
yes |
0 |
lower limit per axes in user units. |
ctrl_config::upper_limit[] |
double |
yes |
32767 |
upper limit per axes in user units. |
ctrl_config::user_to_bit_input[] |
double |
yes |
3276.7 |
user to bit conversion factor per axes for inputs. |
ctrl_config::user_offset_input[] |
double |
yes |
0 |
user offset per axes for inputs. |
ctrl_config::user_to_bit_output[] |
double |
yes |
3276.7 |
user to bit conversion factor per axes for outputs. |
ctrl_config::user_offset_output[] |
double |
yes |
0 |
user offset per axes for outputs. |
An example of a piezo configuration is provided below.
!cfg.include fcf/devmgr/definitions/piezo.yaml:
# Please note some parameters are inherited and therefore not defined here.
piezo1: !cfg.type:Piezo
identifier: PLC1 # OPCUA Object Identifier
prefix: MAIN.Piezo1 # OPCUA attribute prefix
dev_endpoint: opc.tcp://134.171.59.98:4840
sim_endpoint: opc.tcp://134.171.57.209:4840 # Simulation address
fits_prefix: "MOT1"
ctrl_config:
num_axis: 3
max_on: 180
Actuator Specific Configuration¶
The Actuator is one of the few devices that is not transferring any configuration to the controller in the transition from Ready to Operational. The Actuator assumes to have all the configuration defined in the controller (PLC). For knowing the controller configuration, please refer to the PLC Actuator section.
An example of a actuator configuration is provided below.
!cfg.include fcf/devmgr/definitions/actuator.yaml:
# Please note some parameters are inherited and therefore not defined here.
actuator1: !cfg.type:Actuator
identifier: PLC1 # OPCUA Object Identifier
prefix: MAIN.Actuator1 # OPCUA attribute prefix
address: opc.tcp://134.171.59.99:4840
simaddr: opc.tcp://134.171.12.182:4840 # Simulation address
fits_prefix: "MECH1"
ctrl_config:
Database Attributes¶
The Device Manager uses the OLDB to store the actual server configuration and run-time parameters. The keys used by the server follow a hierarchical naming convention. Specific keys for devices use the id of the device in the name. The DB keys can be monitored using the oldbGui utility. All Device Manager keys have a flat structure in Redis DB.
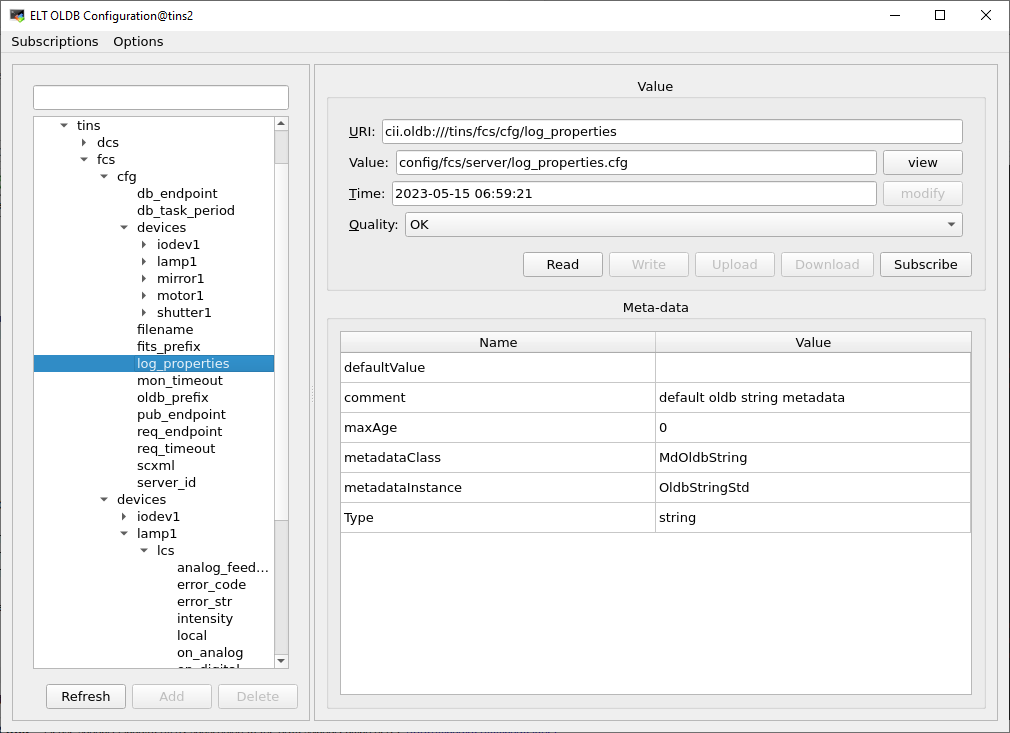
oldbGui utility¶
Server configuration¶
The server stores the actual values of the server configuration parameters into the OLDB . This helps to verify whether the configuration has been loaded correctly. For details of the server configuration parameters, see CII Configuration Service (config-ng).
OLDB Key |
|---|
elt/<instrument id>/<server id>/cfg/db_endpoint |
elt/<instrument id>/<server id>/cfg/db_timeout |
elt/<instrument id>/<server id>/cfg/dictionaries |
elt/<instrument id>/<server id>/cfg/filename |
elt/<instrument id>/<server id>/cfg/fits_prefix |
elt/<instrument id>/<server id>/cfg/log_properties |
elt/<instrument id>/<server id>/cfg/mon_timeout |
elt/<instrument id>/<server id>/cfg/oldb_prefix |
elt/<instrument id>/<server id>/cfg/pub_endpoint |
elt/<instrument id>/<server id>/cfg/req_endpoint |
elt/<instrument id>/<server id>/cfg/scxml |
elt/<instrument id>/<server id>/cfg/server_id |
Server Status¶
The server stores the string representation of its state and substate into the Redis DB.
OLDB Key |
|---|
elt/<instrument id>/<server id>/states/state |
elt/<instrument id>/<server id>/states/substate |
Common Device Keys¶
Each device has a number of common OLDB keys.
OLDB Key |
|---|
elt/<instrument id>/<server id>/cfg/devices/<device id>/dev_endpoint |
elt/<instrument id>/<server id>/cfg/devices/<device id>/sim_endpoint |
elt/<instrument id>/<server id>/cfg/devices/<device id>/cfgfile |
elt/<instrument id>/<server id>/cfg/devices/<device id>/fits_prefix |
elt/<instrument id>/<server id>/cfg/devices/<device id>/ignored |
elt/<instrument id>/<server id>/cfg/devices/<device id>/simulated |
elt/<instrument id>/<server id>/cfg/devices/<device id>/namespace |
elt/<instrument id>/<server id>/cfg/devices/<device id>/prefix |
elt/<instrument id>/<server id>/cfg/devices/<device id>/type |
Shutter¶
Each shutter device defines a set of specific OLDB keys:
OLDB Key |
|---|
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/ignore_closed |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/ignore_fault |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/ignore_open |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/initial_state |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/low_closed |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/low_fault |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/low_open |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/low_switch |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/timeout |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/error_code |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/error_str |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/local |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/state |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/substate |
Lamp¶
Each lamp device defines a set of specific OLDB keys:
OLDB key |
|---|
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/analog_range |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/analog_threshold |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/cooldown |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/ignore_fault |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/initial_state |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/invert_analog |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/low_fault |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/low_on |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/low_switch |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/maxon |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/timeout |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/warmup |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/error_code |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/error_str |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/intensity |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/local |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/state |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/substate |
IODev¶
Each iodev device defines a set of specific OLDB keys:
OLDB key |
|---|
elt/<instrument id>/<server id>/cfg/devices/<device id>/<channel id>/description |
elt/<instrument id>/<server id>/cfg/devices/<device id>/<channel id>/fits_prefix |
elt/<instrument id>/<server id>/cfg/devices/<device id>/<channel id>/header |
elt/<instrument id>/<server id>/cfg/devices/<device id>/<channel id>/log |
elt/<instrument id>/<server id>/cfg/devices/<device id>/<channel id>/map |
elt/<instrument id>/<server id>/cfg/devices/<device id>/<channel id>/type |
elt/<instrument id>/<server id>/cfg/devices/<device id>/<channel id>/unit |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/<channel id> |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/state |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/substate |
Motor¶
Each motor device defines a set of specific OLDB keys:
OLDB key |
|---|
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/active_low_indec |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/active_low_lhw |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/active_low_lstop |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/active_low_ref |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/active_low_uhw |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/active_low_ustop |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/axis_type |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/backlash |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/brake |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/check_inpos |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/disable |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/exec_post_init |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/exec_post_move |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/exec_pre_init |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/exec_pre_move |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/init_seq<number>_action |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/init_seq<number>_value1 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/init_seq<number>_value2 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/lock |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/lock_pos |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/lock_tolerance |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/low_brake |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/low_inpos |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/max_pos |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/min_pos |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/tout_init |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/tout_move |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/tout_switch |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/velocity |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/axis_brake |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/axis_enable |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/axis_info_data1 |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/inposition |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/lock |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/ready |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/error_code |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/error_str |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/init_action |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/init_step |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/initialised |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/local |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/mode |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/pos_actual |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/pos_error |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/pos_target |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/scale_factor |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/signal_index |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/signal_lhw |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/signal_lstop |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/signal_ref |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/signal_uhw |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/signal_ustop |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/state |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/substate |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/vel_actual |
elt/<instrument id>/<server id>/devices/<device id>/pos_actual_name |
elt/<instrument id>/<server id>/devices/<device id>/pos_enc |
elt/<instrument id>/<server id>/devices/<device id>/target_enc |
Derotator¶
The Derotator device uses the same set of OLDB keys as the Motor device plus some additional derotator specific ones that are described below:
OLDB key |
|---|
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/trk_period |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/user_par1 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/user_par2 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/user_par3 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/user_par4 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/user_ref |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/sky_ref |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/tat_ref |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/angle_on_sky |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/alpha |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/delta |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/track_mode |
ADC¶
The Adc device defines a set of specific OLDB keys:
OLDB key |
|---|
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/trk_period |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/afactor |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/minelev |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/poffset |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/pslope |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/toffset |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/tslope |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/zdlimit |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/mot1_coffset |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/mot1_drotfactor |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/mot1_poffset |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/mot1_refauto |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/mot1_refoff |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/mot2_coffset |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/mot2_drotfactor |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/mot2_poffset |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/mot2_refauto |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/mot2_refoff |
elt/<instrument id>/<server id>/cfg/devices/<device id>/ignored |
elt/<instrument id>/<server id>/cfg/devices/<device id>/simulated |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/alpha |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/delta |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/error_code |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/error_str |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/local |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/state |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/substate |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/track_mode |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/motor1.axis_brake |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/motor1.axis_enable |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/motor1.axis_lock |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/motor1.local |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/motor1.pos_actual |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/motor1.pos_enc |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/motor1.scale_factor |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/motor2.axis_brake |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/motor2.axis_enable |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/motor2.axis_lock |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/motor2.local |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/motor2.pos_actual |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/motor2.pos_enc |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/motor2.scale_factor |
elt/<instrument id>/<server id>/devices/<device id>/motor1.pos_enc |
elt/<instrument id>/<server id>/devices/<device id>/motor2.pos_enc |
Piezo¶
The Piezo device defines a set of specific OLDB keys:
OLDB key |
|---|
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/home1 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/home2 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/home3 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/lower_limit1 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/lower_limit2 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/lower_limit3 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/upper_limit1 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/upper_limit2 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/upper_limit3 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/max_on |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/num_axes |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/user_offset_input1 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/user_offset_input2 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/user_offset_input3 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/user_to_bit_input1 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/user_to_bit_input2 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/user_to_bit_input3 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/user_offset_output1 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/user_offset_output2 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/user_offset_output3 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/user_to_bit_output1 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/user_to_bit_output2 |
elt/<instrument id>/<server id>/cfg/devices/<device id>/lcs/user_to_bit_output3 |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/actual_pos_bit1 |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/actual_pos_bit2 |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/actual_pos_bit3 |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/actual_pos_user1 |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/actual_pos_user2 |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/actual_pos_user3 |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/error_codes |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/error_str |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/local |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/state |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/substate |
Actuator¶
Each actuator device defines a set of specific OLDB keys:
OLDB key |
|---|
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/local |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/state |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/substate |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/error_code |
elt/<instrument id>/<server id>/devices/<device id>/lcs/stat/error_str |
Command Interface¶
The commands currently supported by the server are listed here: List of Commands.
Error Handling¶
FCF Commands throw exceptions in case of errors or timeouts. Client applications can catch the exceptions and obtain the error message associated with the function getDesc(). This error does not contain neither the history nor the error stack but it normally indicates precisely where the error occurred.
try {
auto reply = client->GetStatus();
} catch (const fcfif::ExceptionErr& e) {
RAD_LOG_ERROR() << "Error reply " << e.getDesc() << ").";
}
Serialization¶
The Device Manager uses the CII MAL ZPB (ZeroMQ + Google Proto buffers) for serialising commands.
Note
Each command has two parts: a payload and its corresponding reply, see the details in the fcfif module. The normal replies are plain strings.
Setup Command¶
The Setup command is intended to produce a change in the run-time configuration. It is also a way of triggering operational actions on the devices. It is possible to switch a lamp on, close a shutter and move a motor in separate messages or within the same one. This means that the content of the message varies. The devices will de-serialise the message and communicate the actions to be taken to the corresponding PLCs via the interface with the LCS.
The DevMgr is not blocked when receiving concurrent Setup commands (messages). It executes them in separate worker threads that are spawned per each new Setup command. The threads will be running until the commands have been executed successfully, an error occured, the timeout has elapsed or a Stop command is received, see figure below.
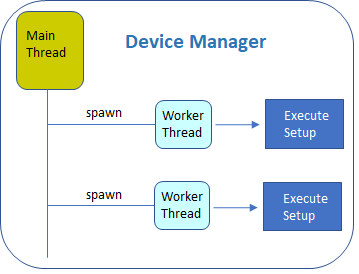
Device Manager Setup worker threads.¶
Note
A Stop command finalizes all ongoing worker threads that are being handled by the Device Manager.
Warning
Conflicting requests across different Setup commands running in parallel are not handled by the Device Manager. They are pushed down to the PLC. The PLC is resolving them depending on the actual status. This means that, if the user sends two consecutive commands with conflicting requests, most likely the second one will get an error from the PLC. The exact behaviour will depend on the specific Device Controller implementation.
Setup Interface Definition¶
The interface definition of the Setup command can be found in module fcfif. The payload is based on an array of unions. The union may contain any device supported by the Device Manager.
<union name="DeviceUnion">
<discriminator type="nonBasic" nonBasicTypeName="DeviceType" />
<case>
<caseDiscriminator value ="SHUTTER"/>
<member name="shutter" type="nonBasic" nonBasicTypeName="ShutterDevice" />
</case>
<case>
<caseDiscriminator value ="LAMP"/>
<member name="lamp" type="nonBasic" nonBasicTypeName="LampDevice" />
</case>
<case>
<caseDiscriminator value ="MOTOR"/>
<member name="motor" type="nonBasic" nonBasicTypeName="MotorDevice" />
</case>
<case>
<caseDiscriminator value ="DROT"/>
<member name="drot" type="nonBasic" nonBasicTypeName="DrotDevice" />
</case>
<case>
<caseDiscriminator value ="ADC"/>
<member name="adc" type="nonBasic" nonBasicTypeName="AdcDevice" />
</case>
<case>
<caseDiscriminator value ="PIEZO"/>
<member name="piezo" type="nonBasic" nonBasicTypeName="PiezoDevice" />
</case>
<case>
<caseDiscriminator value ="ACTUATOR"/>
<member name="actuator" type="nonBasic" nonBasicTypeName="ActuatorDevice" />
</case>
<case>
<caseDiscriminator value ="IODEV"/>
<member name="iodev" type="nonBasic" nonBasicTypeName="IODevDevice" />
</case>
<case>
<caseDiscriminator value ="CUSTOM"/>
<member name="custom" type="nonBasic" nonBasicTypeName="CustomDevice" />
</case>
</union>
Warning
The array does not have a fixed size but it has a limit of 100 elements. A limit is needed by the CII XML ICD.
<method name="Setup" returnType="string" throws="ExceptionErr">
<argument name="payload" type="nonBasic" nonBasicTypeName="SetupElem" arrayDimensions="(100)"/>
</method>
Each device structure may contain parameters and one action per device that can be serialized. An example of the device ICD is shown below.
<struct name="ShutterDevice">
<member name="id" type="string" />
<member name="action" type="nonBasic" nonBasicTypeName="ActionShutter" />
</struct>
<struct name="LampDevice">
<member name="id" type="string" />
<member name="intensity" type="double" />
<member name="time" type="uint32_t" />
<member name="action" type="nonBasic" nonBasicTypeName="ActionLamp" />
</struct>
<struct name="BaseMotorDevice">
<member name="id" type="string" />
<member name="name" type="string" />
<member name="pos" type="double" />
<member name="enc" type="int64_t" />
<member name="speed" type="double" />
<member name="unit" type="nonBasic" nonBasicTypeName="MotorPosUnit" />
</struct>
<struct name="MotorDevice" baseType="BaseMotor">
<member name="action" type="nonBasic" nonBasicTypeName="ActionMotor" />
</struct>
<struct name="DrotDevice" baseType="BaseMotor">
<member name="mode" type="nonBasic" nonBasicTypeName="ModeDrot" />
<member name="action" type="nonBasic" nonBasicTypeName="ActionDrot" />
</struct>
<struct name="AdcDevice" baseType="BaseMotor">
<member name="axis" type="nonBasic" nonBasicTypeName="AxesAdc" />
<member name="mode" type="nonBasic" nonBasicTypeName="ModeAdc" />
<member name="action" type="nonBasic" nonBasicTypeName="ActionAdc" />
</struct>
<struct name="PiezoDevice">
<member name="id" type="string" />
<member name="bit1" type="uint32_t" />
<member name="bit2" type="uint32_t" />
<member name="bit3" type="uint32_t" />
<member name="pos1" type="double" />
<member name="pos2" type="double" />
<member name="pos3" type="double" />
<member name="action" type="nonBasic" nonBasicTypeName="ActionPiezo" />
</struct>
<struct name="ActuatorDevice">
<member name="id" type="string" />
<member name="action" type="nonBasic" nonBasicTypeName="ActionActuator" />
</struct>
<struct name="IODevDevice">
<member name="digarray" type="nonBasic" nonBasicTypeName="DigitalElem" arrayDimensions="(30)" />
<member name="anlgarray" type="nonBasic" nonBasicTypeName="AnalogElem" arrayDimensions="(30)" />
<member name="intarray" type="nonBasic" nonBasicTypeName="IntegerElem" arrayDimensions="(30)" />
<member name="action" type="nonBasic" nonBasicTypeName="ActionIODev" />
</struct>
<struct name="CustomDevice">
<member name="parameters" type="string" />
</struct>
Note
The CustomDevice is to be used for implementing custom devices where the payload data can be
serialized in JSON. The serialization shall be done by the client applications using the parameters
in the CustomDevice structure to carry the information encoded in JSON. The above enables extendability
without the need to provide specific CII XML ICDs which is a significant simplification for instruments.
DevStatus Command¶
The DevStatus command provides information about each device controlled by the Device Manager. An example of the output generated by the DevStatus command is shown below.
$ fcfClient zpb.rr://127.0.0.1:12083 DevStatus ""
shutter1.simulated = true
shutter1.lcs.state = Operational
shutter1.lcs.substate = Close
lamp1.simulated = true
lamp1.lcs.state = Operational
lamp1.lcs.substate = Off
lamp1.lcs.intensity = 0.000000
motor1.simulated = true
motor1.lcs.state = Operational
motor1.lcs.substate = Standstill
motor1.lcs.pos_target = 30.000000
motor1.lcs.pos_actual = 30.002197
motor1.lcs.vel_actual = 0.000000
motor1.lcs.axis_enable = true
motor1.pos_actual_name = ON
motor1.pos_enc = 341
OK
The user could request the status of a specific device or a subset of the devices, see below.
$ fcfClient zpb.rr://127.0.0.1:12083 DevStatus "motor1"
motor1.simulated = true
motor1.lcs.state = Operational
motor1.lcs.substate = Standstill
motor1.lcs.pos_target = 30.000000
motor1.lcs.pos_actual = 30.002197
motor1.lcs.vel_actual = 0.000000
motor1.lcs.axis_enable = true
motor1.pos_actual_name = ON
motor1.pos_enc = 341
OK
$ fcfClient zpb.rr://127.0.0.1:12083 DevStatus "lamp1, motor1"
lamp1.simulated = true
lamp1.lcs.state = Operational
lamp1.lcs.substate = Off
lamp1.lcs.intensity = 0.000000
motor1.simulated = true
motor1.lcs.state = Operational
motor1.lcs.substate = Standstill
motor1.lcs.pos_target = 30.000000
motor1.lcs.pos_actual = 30.002197
motor1.lcs.vel_actual = 0.000000
motor1.lcs.axis_enable = true
motor1.pos_actual_name = ON
motor1.pos_enc = 341
OK
Note
The list of devices is comma-separated.
Ignore Command¶
This command tells the Device Manager to completely ignore a device. It can be used when there are hardware failures or when the hardware is not yet available. The following example shows a sequence that ignores device lamp1, gets the status of the devices and then stops ignoring the device.
Note
When a device is ignored, no other information is provided for this device when processing the status command.
$ fcfClient zpb.rr://127.0.0.1:12083 Ignore "lamp1"
$ fcfClient zpb.rr://127.0.0.1:12083 Status "lamp1"
lamp1.ignored = true
OK
$ fcfClient zpb.rr://127.0.0.1:12083 StopIgn "lamp1"
$ fcfClient zpb.rr://127.0.0.1:12083 Status "lamp1"
lamp1.simulated = true
lamp1.lcs.state = Operational
lamp1.lcs.substate = Off
lamp1.lcs.intensity = 0.000000
OK
Simulate Command¶
This command tells the Device Manager to use the simulation address of the device. If the Device Manager is already connected, it will disconnect from the normal address and connect to the simulator. When the simulation is stopped, the server reverts the action and the device is back to normal mode.
The purpose of the simulation is to be able to validate the response of the Device Manager under different error conditions. It also allows to test the high-level SW when the HW is not yet available.
$ fcfClient zpb.rr://127.0.0.1:12083 Simulate "lamp1"
$ fcfClient zpb.rr://127.0.0.1:12083 Status "lamp1"
lamp1.simulated = true
lamp1.lcs.state = Operational
lamp1.lcs.substate = Off
lamp1.lcs.intensity = 0.000000
OK
$ fcfClient zpb.rr://127.0.0.1:12083 StopSim "lamp1"
$ fcfClient zpb.rr://127.0.0.1:12083 Status "lamp1"
lamp1.lcs.state = Operational
lamp1.lcs.substate = Off
lamp1.lcs.intensity = 0.000000
OK
DevNames Command¶
The DevNames command provides the list of devices managed by the Device Manager.
DevsInfo Command¶
The DevsInfo command provides the list of devices managed by the Device Manager with their corresponding types.
DevConfig¶
The DevConfig command provides the loaded configuration of a particular device.
Troubleshooting¶
Logging¶
The Device Manager has implemented logging based on the log4cplus package. The log4cplus package defines four standard logging levels that could give additional information to the developer for troubleshooting.
Name |
Verbosity |
Description |
|---|---|---|
ERROR |
very low |
Provide logging only in case of errors (default). |
INFO |
low |
Provide information for the most important actions. |
DEBUG |
medium |
Provide additional information for the developer. |
TRACE |
very high |
Includes all the function tracing. |
To activate a new logging, the command SetLogLevel shall be used. See the example below.
$ fcfClient zpb.rr://127.0.0.1:12083 SetLogLevel "TRACE"
Note
This logging level affects only the general Devmgr logger.
Loggers¶
The Devmgr provides a default configuration (log_properties.cfg) for the logging. This configuration defines one
general logger (app) and a logger per device type, e.g. (shutter). The device loggers will
help when troubleshooting specific devices.
Logger |
Description |
|---|---|
app |
General logger for common server classes. |
shutter |
Specific logger for Shutter classes. |
lamp |
Specific logger for lamp classes. |
motor |
Specific logger for motor classes. |
sensor |
Specific logger for sensor classes. |
piezo |
Specific logger for piezo classes. |
actuator |
Specific logger for actuator classes. |
iodev |
Specific logger for iodev classes. |
drot |
Specific logger for drot classes. |
adc |
Specific logger for adc classes. |
To activate a new logging level for a specific logger, one should use the FCF CLI, see the example below.
$ fcfcli
$ fcsSh> setloglevel TRACE,lamp
The server will start logging the tracing information for the lamp classes and you should see something like the following:
2021-07-02T14:30:17.624 TRACE ENTER: virtual void fcf::devmgr::lamp::Lamp::Setup(const std::any&)
2021-07-02T14:30:17.624 TRACE EXIT: virtual void fcf::devmgr::lamp::Lamp::Setup(const std::any&)
2021-07-02T14:30:17.638 TRACE ENTER: virtual bool fcf::devmgr::lamp::Lamp::IsSetupActive(const std::any&) const
2021-07-02T14:30:17.638 TRACE EXIT: virtual bool fcf::devmgr::lamp::Lamp::IsSetupActive(const std::any&) const
...
Note
If a the second parameter is not provided, the logging level will affect the general logger.
Note
If you are missing some logging information for some devices, it might be that the logging is happening in the specific device classes so you need to enable the device logger to see all the logging. When you use the application logger, it affects only to the common classes.
Log File¶
The default log configuration provides two appenders. One for the console and another one for a file. The file is stored by default in the home directory of the user running the Devmgr. The name of the file is fcfDevmgr.log.
OPC-UA Client¶
Sometimes it is better to check the status of the PLC using an OPC-UA client. One of the best tools available is the UaExpert from Unified Automation. This tool enables the control and monitoring of all device variables independently of the Device Manager. The user can trigger the execution of RPCs and monitor the device state changes. The UaExpert is an essential tool for troubleshooting.
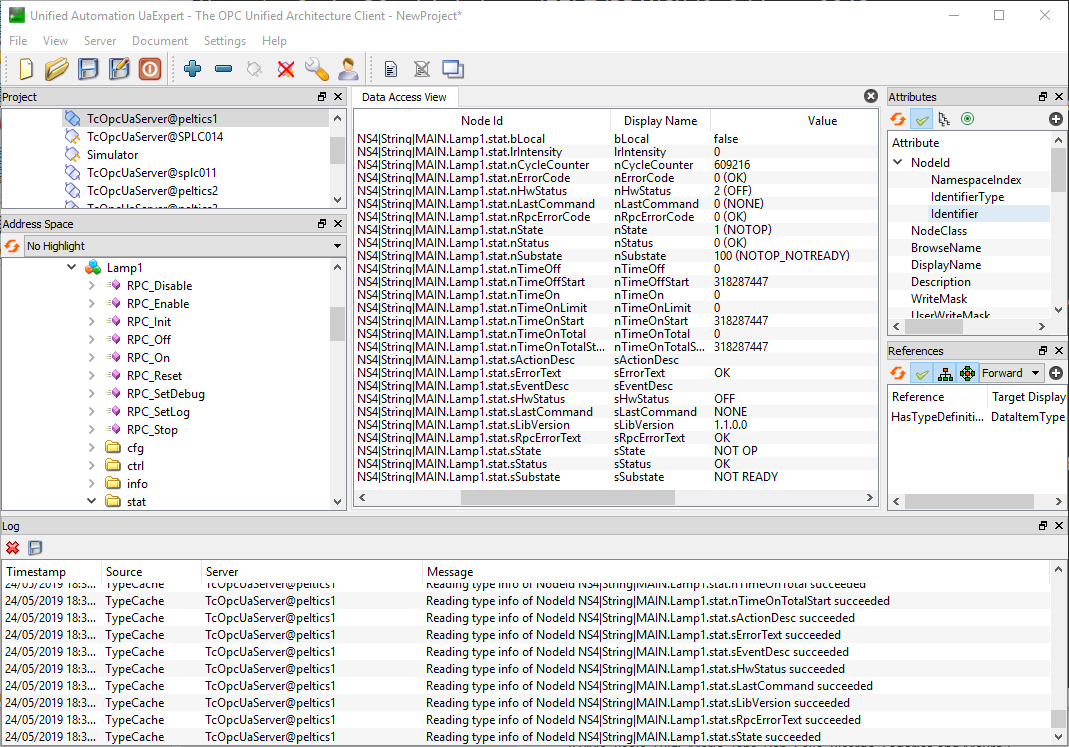
UaExpert OPC-UA client.¶