Alert Service interface. More...
#include <alertServiceIf.hpp>
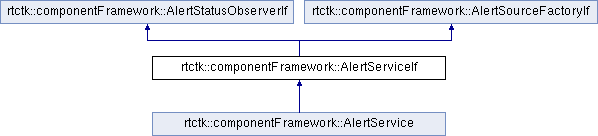
Inheritance diagram for rtctk::componentFramework::AlertServiceIf:
Public Member Functions | |
| virtual | ~AlertServiceIf () noexcept=default |
 Public Member Functions inherited from rtctk::componentFramework::AlertStatusObserverIf Public Member Functions inherited from rtctk::componentFramework::AlertStatusObserverIf | |
| virtual | ~AlertStatusObserverIf () noexcept=default |
| virtual ReducedStatus | GetReducedStatus () const =0 |
| Get the reduced status. More... | |
| virtual std::vector< AlertStatus > | GetAlertStatuses () const =0 |
| Get status of all alert conditions. More... | |
| virtual boost::signals2::connection | ConnectReducedStatus (ReducedStatusSignal::slot_type slot)=0 |
| Connects a slot to the reduced alert signal. More... | |
| Public Member Functions inherited from rtctk::componentFramework::AlertSourceFactoryIf | |
| virtual | ~AlertSourceFactoryIf () noexcept=default |
| virtual AlertSource | MakeAlertSource (AlertDescription const &description)=0 |
| Creates a new alert source for the specified alert condition. More... | |
Additional Inherited Members | |
| Public Types inherited from rtctk::componentFramework::AlertStatusObserverIf | |
| using | ReducedStatus = std::optional< bool > |
| Represents current alert status. More... | |
| using | TimePoint = std::chrono::system_clock::time_point |
| Timestamp type used throughout AlertServiceIf. More... | |
| using | ReducedStatusSignal = boost::signals2::signal< void(ReducedStatus const &, std::vector< AlertStatus > const &)> |
| Signal emitted for every change in reduced alert status. More... | |
Detailed Description
Alert Service interface.
Main responsibility of the Alert Service is to allow software to dynamically create new AlertSources, each of which is uniquely associated to a AlertDescription that can be active or inactive.
The AlertSource is then used to signal that the AlertDescription is active or inactive with AlertSource::Set() and AlertSource::Clear().
The AlertService implementation then reduces all conditions to one status which can be observed for changes with the AlertServiceIf::ReducedStatusSignal.
- Thread Safety
- thread-safe – All implementations are required to be thread safe in the public API defined in this interface.
Constructor & Destructor Documentation
◆ ~AlertServiceIf()
|
virtualdefaultnoexcept |
The documentation for this class was generated from the following file:
- componentFramework/services/alert/src/include/rtctk/componentFramework/alertServiceIf.hpp