import "acscourseMount.idl";
Public Member Functions | |
| void | objfix (in double az, in double elev) |
| void | objfix_async (in double az, in double elev, in ACS::CBvoid callBack, in ACS::CBDescIn desc) |
| void | objfix (in double az, in double elev) |
| void | objfix_async (in double az, in double elev, in ACS::CBvoid callBack, in ACS::CBDescIn desc) |
Public Attributes | |
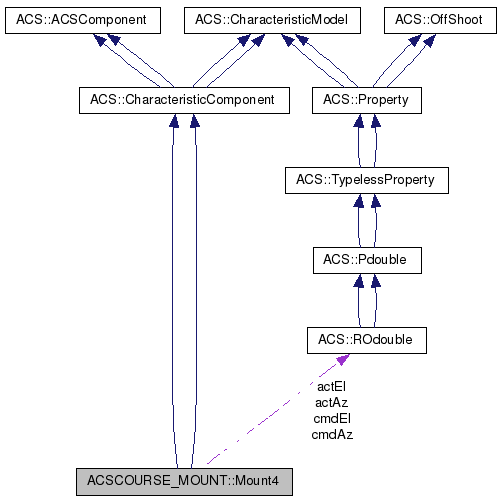
| readonly attribute ACS::ROdouble | cmdAz |
| readonly attribute ACS::ROdouble | cmdEl |
| readonly attribute ACS::ROdouble | actAz |
| readonly attribute ACS::ROdouble | actEl |
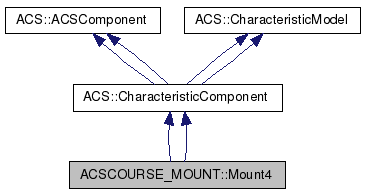
Detailed Description
Defines the interface for controlling and monitoring the antenna position. This interface also includes aynchronous methods.
Member Function Documentation
| void ACSCOURSE_MOUNT::Mount4::objfix | ( | in double | az, | |
| in double | elev | |||
| ) |
(Pre)sets a new non-moving position for the antenna. The position coordinates are given in azimuth and elevation. Synchronous interface
- Parameters:
-
az position azimuth (degree) elev position elevation (degree)
| void ACSCOURSE_MOUNT::Mount4::objfix | ( | in double | az, | |
| in double | elev | |||
| ) |
(Pre)sets a new non-moving position for the antenna. The position coordinates are given in azimuth and elevation. Synchronous interface
- Parameters:
-
az position azimuth (degree) elev position elevation (degree)
| void ACSCOURSE_MOUNT::Mount4::objfix_async | ( | in double | az, | |
| in double | elev, | |||
| in ACS::CBvoid | callBack, | |||
| in ACS::CBDescIn | desc | |||
| ) |
(Pre)sets a new non-moving position for the antenna. The position coordinates are given in azimuth and elevation. Asynchonous interface. A callback is used to inform the caller when the antenna reaches the new position. If a new position is given before the previous one is reached then the previous callback immediately receives "aborted".
- Parameters:
-
az position azimuth (degree) elev position elevation (degree) callBack callback when position is reached desc is used to negotiate timeouts between client and sever
| void ACSCOURSE_MOUNT::Mount4::objfix_async | ( | in double | az, | |
| in double | elev, | |||
| in ACS::CBvoid | callBack, | |||
| in ACS::CBDescIn | desc | |||
| ) |
(Pre)sets a new non-moving position for the antenna. The position coordinates are given in azimuth and elevation. Asynchonous interface. A callback is used to inform the caller when the antenna reaches the new position. If a new position is given before the previous one is reached then the previous callback immediately receives "aborted".
- Parameters:
-
az position azimuth (degree) elev position elevation (degree) callBack callback when position is reached desc is used to negotiate timeouts between client and sever
Member Data Documentation
| readonly attribute ACS::ROdouble ACSCOURSE_MOUNT::Mount4::actAz |
Current actual azimuth (degree).
| readonly attribute ACS::ROdouble ACSCOURSE_MOUNT::Mount4::actEl |
Current actual elevation (degree).
| readonly attribute ACS::ROdouble ACSCOURSE_MOUNT::Mount4::cmdAz |
Current commanded azimuth (degree).
| readonly attribute ACS::ROdouble ACSCOURSE_MOUNT::Mount4::cmdEl |
Current commanded elevation (degree).
The documentation for this interface was generated from the following files:
