Subsystem Simulator¶
The Subsystem Simulator mimics the respond of a generic subsystem process. It is used to have an independent validation of the standard interface used between the System Supervisor and subsystems. The Subsystem Simulator is a dummy RAD based application which implements the standard state machine and the standard interface together with few specific features. From now on we will use the term Simulator to refer to the Subsystem Simulator.
The Simulator uses the Redis Database to store run-time information. The Simulator publishes its own status following the requirements for interacting with the System Supervisor.
Simulator State Machine¶
The Simulator uses a state machine described in a SCXML format that is
interpreted by the state machine engine provided by the rad application framework.
(SCXML specification).
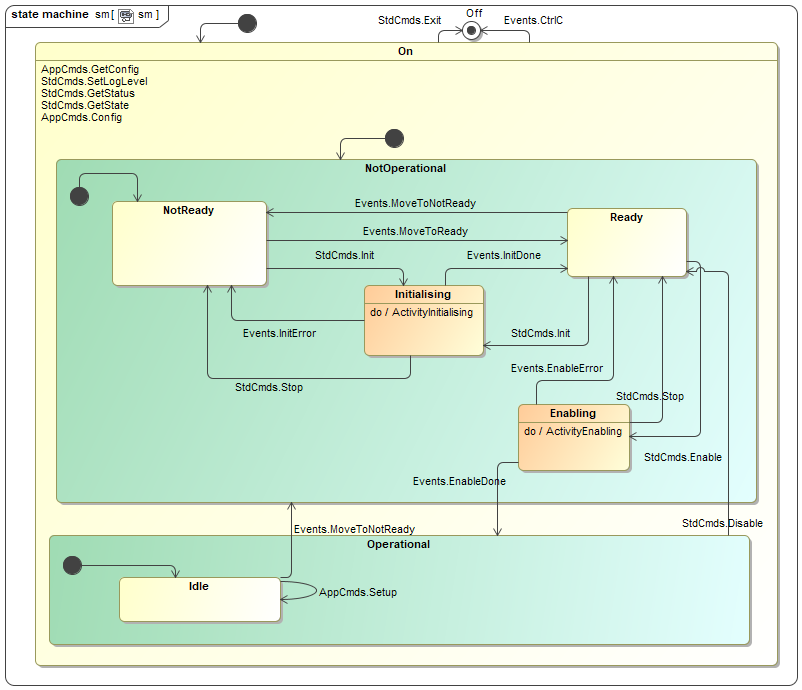
Simulator State Machine Diagram.¶
Off –> NotReady, event: Startup
The Simulator starts up and goes automatically to NotOperational/NotReady. Main server objects are instantiated including the basic application that uses the State Machine engine. The Simulator reads its own configuration and completes its initialisation.
NotReady –> Ready, event: Init
The Simulator moves from NotReady to Ready state by going through the Initialising transient state. During this transient state, the simulator will wait according to the configured delay time before to reply to the originator.
NotOperational/Ready –> Operational/Idle, event: Enable
The Simulator moves from NotOperational/Ready to Operational/Idle by going through the Enabling transient state. During this transient state, the simulator will wait according to the configured delay time before to reply to the originator.
Operational –> NotOperational/Ready, event: Disable
The Simulator is moved back to NotOperational/Ready substate.
NotOperational/Ready –> NotOperational/NotReady, event Reset
The Simulator is moved back to NotOperational/NotReady substate.
Configuration¶
SubSystem Simulator Configuration¶
The server configuration is a file written in yaml format.
(YAML specification). YAML is easy to read format
that has been adopted temporary until the integration with CII configuration services.
Many resources about YAML can be found on the web. One could also validate the format online, see http://yaml.org/spec/
server_id
This is the id associated with the specific server. This id is used to associate all server configuration parameters as well as the prefix for the DB keys.
<server id>::req_endpoint
This is the endpoint for CII MAL request/reply. The server will listen to incoming commands using this endpoint.
<server id>::pub_endpoint
This is the endpoint for CII MAL pub/sub. The server will publish device topics using this endpoint.
<server id>::db_endpoint
This is the endpoint used by the server for connecting to the Redis DB.
<server id>::db_timeout
This is the server timeout for connecting to the Redis DB.
<server id>::scxml
This is the state machine specification file used by the server.
<server id>::commands
This is the list of commands active in the Simulator configuration. Only commands listed here will be managed by the Simulator.
<server id>::cmdtout
General command timeout.
Each command has its own set of configuration parameters
<command id>::reply_ok
This is a flag to indicate if command replies successfully or not. When it is true, the command replies ok otherwise it returns with an error.
<command id>::reply_delay
This is the delay in milliseconds to be used to reply to the originator.
<command id>::reply_ok_message
This is the message to be used when replying successfully.
<command id>::reply_error_msg
This is the message to be used when replying with an error.
<command id>::reply_error_code
This is a flag to enable/disable accessibility of a subsystem.
An example of a server configuration is provided below.
server_id : 'subsim1'
subsim1:
req_endpoint : "zpb.rr://127.0.0.1:15080/"
pub_endpoint : "zpb.ps://127.0.0.1:15040/"
db_endpoint : "127.0.0.1:6379"
db_timeout : 2
scxml : "sup/subsim/server/sm.xml"
commands : ['Init', 'Enable', 'Disable']
cmdtout : 60000
Init:
reply_ok: true
reply_delay: 3000
reply_ok_message: "OK"
reply_error_msg: "Init failed - subsystem could not initialize"
reply_error_code: -1
Enable:
reply_ok: true
reply_delay: 3000
reply_ok_message: "OK"
reply_error_msg: "ERROR: Enable failed"
reply_error_code: -1
Disable:
reply_ok: true
reply_delay: 0
reply_error_msg: "OK"
reply_message: "ERROR: Disable failed"
reply_error_code: -1
Server configuration¶
The simulator stores the actual values of the server configuration parameters into the Redis DB . This helps to verify whether the configuration has been loaded correctly. For details of the server configuration parameters, see :ref: sup_sim_config_ref_.
Redis Key |
|---|
<server id>.cfg.db_endpoint |
<server id>.cfg.db_timeout |
<server id>.cfg.cmdtout |
<server id>.cfg.conntout |
<server id>.cfg.filename |
<server id>.cfg.loglevel |
<server id>.cfg.pub_endpoint |
<server id>.cfg.req_endpoint |
<server id>.cfg.commands |
<server id>.cfg.scxml |
<server id>.cfg.<command id>.reply_delay |
<server id>.cfg.<command id>.reply_error_msg |
<server id>.cfg.<command id>.reply_ok |
Commands¶
Error Handling¶
Simulator commands throw an exception (subsimif::ExceptionErr) in case of errors or timeouts from Simulator specific commands. For standard commands, the server throws a stdif::Exception. Client applications can catch the exceptions and obtain the error message associated with the function getDesc(). This error does not contain neither the history nor the error stack but it normally indicates precisely where the error occurred.
try {
auto reply = client->GetState();
} catch (const stdif::ExceptionErr& e) {
RAD_LOG_ERROR() << "Error reply " << e.getDesc() << ").";
}
Serialization¶
The Subsystem Simulator uses the CII MAL ZPB (ZeroMQ + Google Proto buffers) for serialising commands.
Note
Each command has two parts: a payload and its corresponding reply, see the details in the supif module. The normal replies are plain strings.
Sever Commands¶
The commands (events) currently supported by the Simulator are:
Command |
Parameters |
Interface |
|---|---|---|
Init |
“” |
stdif |
Enable |
“” |
stdif |
Disable |
“” |
stdif |
Reset |
“” |
stdif |
GetState |
“” |
stdif |
GetStatus |
“” |
stdif |
Exit |
“” |
stdif |
SetLog |
“<ERROR|INFO|DEBUG|TRACE>” |
subsimif |
Setup |
“” |
subsimif |
Config |
“<config buffer>” |
subsimif |
GetConfig |
“” |
subsimif |
Setup Command¶
The Setup command is intended to mimic a change in the run-time configuration.
This command does not really setup anything, it only emulates the behaviour for testing purposes.
Config Command¶
The Config command is intended to change configuration parameters of the Simulator at run-time.
GetConfig Command¶
The GetConfig command returns the actual configuration used by the Simulator. This command is useful when starting the process with Nomad where configuration might be rendered.
Publishing¶
The Subsystem Simulator publishes as any other subsystem its state/substate. This is a requirement for enable visibility from the System Supervisor.
Parameter |
end point |
|---|---|
status |
<ps endpoint>/std/status |
Troubleshooting¶
Logging¶
The System Supervisor has implemented six logging levels that provide additional information for troubleshooting to the developer.
Name |
Verbosity |
Description |
|---|---|---|
ERROR |
very low |
Provide logging only in case of errors. |
INFO |
low |
Provide information for the most important actions (default). |
DEBUG |
medium |
Provide additional information for the developer. |
DEBUG2 |
high |
Includes more details such as Node IDs of OPC-UA attributes |
DEBUG3 |
high |
Includes the logging of each subscription event. |
TRACE |
very high |
Includes all the function tracing. |
To activate a new logging, the command SetLog shall be used. See the example below.
C++ Simulator Client¶
The client application (supsimClient) is a simple utility allowing to send messages to the Simulator from
the command line. In this context we use the words messages and events as synonyms.
The supDummyClient uses two interface module (stdif and supsimif) to compose the payload of the messages. For
simplicity purposes, the associated interface for each command is hidden to the user.
The supsimClient sends the messages using CII MAL request/reply.
Note
This client uses the synchronous version of the stdif and supsimif interfaces.
$ supsimClient <serviceURI> <command> ["<parameters>"]
Where
<serviceURI> destination of the command (e.g. zpb.rr://127.0.0.1:12081)
<command> command to be sent to the server (e.g. Init)
<parameters> optional parameters of the command.
Examples¶
$ supsimClient zpb.rr://134.171.3.48:30519 Init
Note
The Config command is not supported by the C++ client.
Python Client Library¶
It is possible to communicate with the Subsystem Simulator through clients developed in
Python. The Simulator provides a library that simplifies the interaction with the System Supervisor (subsimclib).
Users might want to interact directly with Supervisor ICD binding methods. This is, of course possible, but it is outside the scope of this library.
Note
The Supervisor python library uses the synchronous mal interface.
Error Handling¶
The subsimclib reports as a RuntimeError exceptions that may be delivered by the Simulator.
Classes¶
The subsimclib library provides one class that encapsulates the interface with the Supervisor.
This class is the SubsimCommands class.
SubsimCommands¶
The constructor of the SubsimCommands class support two parameters: uri and timeout. The timeout is optional and has a default of one minute, expressed in milliseconds.
The class handles two MAL client interfaces to deal with standard commands and Simulator specific commands. The correct interface will be selected according to the method used so this is hidden to the user.
Methods for Command Interface¶
Method |
parameters |
interface |
|---|---|---|
setup |
<setup buffer> |
subsimif |
config |
None |
subsimif |
get_config |
None |
subsimif |
get_state |
None |
stdif |
get_status |
None |
stdif |
init |
None |
stdif |
enable |
None |
stdif |
disable |
None |
stdif |
reset |
None |
stdif |
stop |
None |
stdif |
Additional Methods¶
The SubsimCommands class provides additional methods which uses the Config command to facilitate the update of the configuration at run-time.
Method |
parameters |
interface |
|---|---|---|
cfgreply |
<cmd>, <flag> |
subsimif |
cfgdelay |
<cmd>, <delay> |
subsimif |
cfgerrmsg |
<cmd>, <msg> |
subsimif |
Simulator CLI¶
The Simulator CLI (subsimcli) provides a experimental command shell with simple
commands aiming to simplify the interaction with the Simulator. The Simulator shell can be invoked issuing the
command subsimcli.
The subsimcli offers few command line parameters. If no parameters are specified. The subsimcli shell commands are not necessary using the same names as the MAL interfaces with the purpose to shorten the commands names. Commands that could take long time, are executed in a dedicated thread to allow the shell to continue being responsive while waiting for the answer from the previous command. Asynchronous CII cannot be used here because unlike in C++, it is not really asynchronous in python (see ECII-365)
Parameter |
Description |
|---|---|
–uri |
if the URI is specified, the subsimcli will use it to connect to the server |
–name |
When using nomad, one could specify the name of the service instead of the URI |
Warning
The subsimcli shell assumes NOMAD/CONSUL services are up and running. If this is not the case then only –uri parameter can be used.
Note
The subsimcli shell was created for the Simulator but since it uses the standard interface, it can be used for any server implementing this interface, although only for the standard events like init, enable, disable, etc.
subsimcli --uri zpb.rr://134.171.3.48:30269
subsimSh>?
Available command list:
- cfgdelay
- cfgreply
- cfgerrmsg
- disable
- enable
- help
- init
- reset
- setup
- get_config
- state
- status
Command |
Parameters |
Description |
|---|---|---|
disable |
sends the disable (stdif) event to the connected server |
|
enable |
sends the enable (stdif) event to the connected server |
|
help |
print the list of supported commands |
|
init |
sends the init (stdif) event to the connected server |
|
reset |
sends the reset (stdif) event to the connected server |
|
setup |
sends the setup (subsimif) event to the connected server |
|
get_config |
sends the GetConfig (subsimif) event to the connected server |
|
cfgreply |
<cmd>,<true|false> |
Configure reply flag for a given command. If flag is true, the command will return successfully otherwise with an error. |
cfgdelay |
<cmd>,<delay> |
Configure reply delay for a given command in milliseconds. |
cfgerrmsg |
<cmd>,<msg> |
Configure reply error message for a given command. The reply flag has to be false to take any effect. |
ctrl-d |
Stop the shell |
Forcing Init command to finalize with an error:
subsimSh> cfgreply Init,false
reply> = OK
subsimSh>
Changing delay time for Init command:
subsimSh> cfgdelay Init,3000
reply> = OK
subsimSh>