The drotControllerData struct. More...
#include <drotLcsIf.hpp>
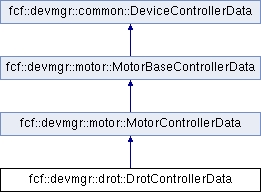
Inheritance diagram for fcf::devmgr::drot::DrotControllerData:
Protected Attributes | |
| short | m_tracking_mode {0} |
| double | m_rotation {0.0} |
| double | m_pupil {0.0} |
| double | m_angle_on_sky {0.0} |
| double | m_track_offset {0.0} |
 Protected Attributes inherited from fcf::devmgr::motor::MotorControllerData Protected Attributes inherited from fcf::devmgr::motor::MotorControllerData | |
| double | m_scale_factor {1} |
| bool | m_brake {false} |
| bool | m_enabled {false} |
| bool | m_locked {false} |
| int | m_mode {} |
| bool | m_ready {false} |
| bool | m_in_position {false} |
| int | m_info_data1 {} |
| int | m_info_data2 {} |
| std::vector< bool > | m_signals |
| Protected Attributes inherited from fcf::devmgr::motor::MotorBaseControllerData | |
| double | m_target_pos {} |
| double | m_actual_pos {} |
| double | m_pos_error {} |
| double | m_actual_vel {} |
| double | m_target_vel {} |
| double | m_scale_factor {1} |
| Protected Attributes inherited from fcf::devmgr::common::DeviceControllerData | |
| int | m_state |
| int | m_substate |
| bool | m_local |
| int | m_error_code |
Detailed Description
The drotControllerData struct.
This structure is used store the status information about the drot. The drotLcsIf class will read the drot status information from the controller and it will store it in this structure.
Constructor & Destructor Documentation
◆ DrotControllerData()
| fcf::devmgr::drot::DrotControllerData::DrotControllerData | ( | ) |
◆ ~DrotControllerData()
|
virtual |
Member Function Documentation
◆ GetAngleOnSky()
|
inline |
◆ GetErrorText()
|
inlinevirtual |
Reimplemented from fcf::devmgr::motor::MotorControllerData.
◆ GetPupilAngle()
|
inline |
◆ GetRotationAngle()
|
inline |
◆ GetSubstateStr()
|
inlinevirtual |
Reimplemented from fcf::devmgr::motor::MotorBaseControllerData.
◆ GetTrackingMode()
|
inline |
◆ GetTrackingModeStr()
|
inline |
◆ GetTrackOffset()
|
inline |
◆ SetAngleOnSky()
|
inline |
◆ SetData()
| void fcf::devmgr::drot::DrotControllerData::SetData | ( | const DrotControllerData & | data | ) |
◆ SetPupilAngle()
|
inline |
◆ SetRotationAngle()
|
inline |
◆ SetTrackingMode()
|
inline |
◆ SetTrackOffset()
|
inline |
Member Data Documentation
◆ m_angle_on_sky
|
protected |
◆ m_pupil
|
protected |
◆ m_rotation
|
protected |
◆ m_track_offset
|
protected |
◆ m_tracking_mode
|
protected |
The documentation for this struct was generated from the following files:
- devmgr/devices/src/include/fcf/devmgr/devices/drotLcsIf.hpp
- devmgr/devices/src/drotLcsIf.cpp