import "acsexmplMount.idl";
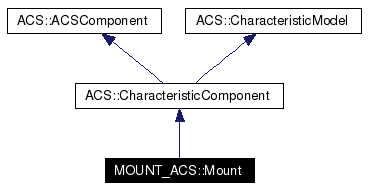
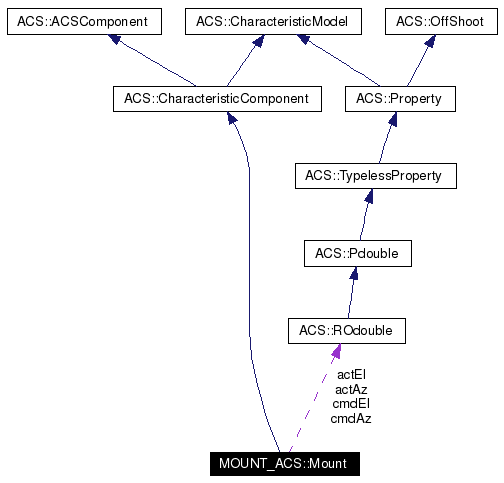
Inheritance diagram for MOUNT_ACS::Mount:
Public Types | |
| enum | coordType { Mean, Apparent } |
Public Member Functions | |
| void | obstar (in double ra, in double dec, in double pmRa, in double pmDec, in double radVel, in double par, in coordType type, in ACS::CBvoid callBack, in ACS::CBDescIn desc) |
| void | objfix (in double az, in double elev, in ACS::CBvoid callBack, in ACS::CBDescIn desc) |
Public Attributes | |
| readonly attribute ACS::ROdouble | cmdAz |
| readonly attribute ACS::ROdouble | cmdEl |
| readonly attribute ACS::ROdouble | actAz |
| readonly attribute ACS::ROdouble | actEl |
|
|
The antenna can be controlled in one of those two modes. |
|
||||||||||||||||||||
|
(Pre)sets a new non-moving position for the antenna. The position coordinates are given in azimuth and elevation. A callback is used to inform the caller when the antenna reaches the new position. If a new position is given before the previous one is reached then the previous callback immediately receives "aborted".
|
|
||||||||||||||||||||||||||||||||||||||||
|
(Pre)sets a new equatorial source for the antenna to track. The source position is given in geocentric equatorial J2000 coordinates. A callback is used to inform the caller when the antenna reaches the new position. If a new position is given before the previous one is reached then the previous callback immediately receives "aborted".
|
|
|
Current actual azimuth (degree). |
|
|
Current actual elevation (degree). |
|
|
Current commanded azimuth (degree). |
|
|
Current commanded elevation (degree). |
 1.3.8
1.3.8