1. Introduction¶
This User Manual describes how to build C++ applications for the ELT using the Rapid Application Development (RAD) toolkit.
RAD is an application framework that enables the development of event-driven distributed applications based on state machines.
The rest of the document describes:
How an application based on RAD looks like.
RAD libraries and tools.
How to configure the user development environment, retrieve, build, and install RAD.
How to create an application based on RAD from templates.
Examples of applications based on RAD.
COMODO tool for UML/SysML model transformations.
2. RAD Based Applications¶
An application based on RAD toolkit reacts to internal or external events by invoking actions and/or starting activities as specified in a State Machine model.
2.1. Events¶
RAD based applications reacts to events. Events can be:
Requests
Replies
Topics
Timeouts
Unix signals (CTRL-C, etc.)
Internal events (events generated by the application itself)
Events are implemented by C++ classes containing an event identifier and a payload. To facilitate the application development, it is possible to define in a text file with extension .rad.ev the list of events (the identifier and the payload data structure). This file is then processed at compile time by the RAD tool codegen to generate the C++ classes (see for example `events.rad.ev`_).
2.2. Event Loop¶
The event loop is responsible for continuously listening to requests, replies, topics, timeouts, UNIX signals, etc. and for invoking the associated callback. The callback creates an event which is inject it into the State Machine Engine. The State Machine engine depending on the current state and the injected event, selects which actions to invoke, which activities to start and to which state to move in.
In RAD the event loop is implemented using BOOST ASIO.
2.3. Actions¶
Actions represent short lasting tasks (ideally lasting 0 time) implemented using methods of a C++ class. They are similar to callback functions invoked when an event occurs and the application is in a given state.
2.4. Activities¶
Activities represent long lasting tasks. They are started when entering a given state and are stopped when exiting the state. They can be implemented by:
classes with a run() method which is executed on a separate thread.
classes implementing co-routines.
2.5. State Machine Model¶
When to invoke an action or to start/stop an activity is defined in the State Machine model. The model describes for each state and event which action to invoke and which activity to start/stop. The State Machine model is specified using a domain specific language: StateChartXML (SCXML). SCXML is a W3C recommendation that allows to specify a State Machine using XML (for an example see sm.xml). The SCXML State Machine model can be executed at run-time using an SCXML interpreter. RAD provides scxml4cpp library as SCXML interpreter. Note that events, actions, and activities C++ implementation have an identifier that should match the names in the SCXML model.
2.6. Error Handling¶
Exceptions and errors occurring within Actions, Guards, or Do-Activities, can be handled in three ways:
Local Error Handling: catching the exception and, in case of request, sending an error reply to the originator of the request, or, in case of other events, logging the error.
State Machine Error Handling: catching the exception and triggering a related error event. In this case the error event should be handled by another action locally (via the Local Error Handling). E.g. an exception occurs in a Do-Activity (secondary thread) and the Do-Activity post an error event into the State Machine (main thread) to, for example, send an error reply.
Global Error Handling, the exception is caught by the main() function within the global try-catch.
2.7. Application Development¶
In order to develop a RAD based application, the developer has to provide:
A text file with extension .rad.ev containing the list of internal and external events processed by the application.
A text file in SCXML format containing the State Machine model.
C++ implementation of the actions and activities classes.
C++ implementation of the application configuration, runtime data, and Online DB interface classes.
RAD provides a fast way to create an application using Cookiecutter templates. By running the template(s) a fully working application with a basic State Machine model, events, and actions are generated.
See the tutorial Tutorial 1: Creating an Application with RAD + CII for detailed information on how to develop an application using RAD.
3. RAD Libraries and Tools¶
RAD libraries provide transparent access and integration with the Software Platform services. They also group functionalities common to all applications and not provided by the Software Platform.
3.1. Application Stack¶
ELT applications based on RAD are built on top of the following application stack:
Level |
Application Stack |
Description |
|---|---|---|
4 |
Application |
Your application(s) |
3 |
Application Framework |
RAD Libraries and Tools |
2 |
Software Platform |
Core Integration Infrastructure (CII) |
1 |
Development Env. |
Linux CentOS, GNU C++, waf, etc. |
0 |
Hardware or VM |
Servers |
At the ground level of the application stack are the ESO standard servers and Virtual Machines (VM). They are installed with the ELT Development Environment.
The ELT Development Environment, level 1, is based on Linux Cent OS and includes the GNU C++ compiler, waf building tool, and many other libraries such the Google Unit Tests, Robot framework for the integration tests, etc. (see: Guide to Developing Software for the EELT).
The Software Platform, level 2, is a set of libraries, running on top of the Development Environment, that provides common services such as: Error Handling, Logging, Messaging, Configuration, In-memory DB (Online-DB), Alarms, etc. The official ELT Software Platform is the Core Integration Infrastructure (CII). Since there was the need to start developing applications before the introduction of CII, a Prototype SW platform (made of ZeroMQ, Google Protocol Buffers, C++ exceptions, EasyLogging, Redis in-memory DB, YAML configuration files) can also be used.
The currently official services to be used are listed in the following table.
Service |
Description |
|---|---|
Error Handling |
C++ Exceptions |
Logging |
CII logging API based on log4cplus |
Messaging |
CII/MAL ZPB Req/Rep and Pub/Sub |
Configuration |
CII Config-NG service |
Online-DB |
CII OLDB in-memory key/value DB |
The application framework, level 3, can be used to develop State Machine based applications that use the services described in the table above.
Warning
RAD will use more CII services as soon as they become available, therefore applications developed with the current version of RAD may have to be ported.
3.2. Libraries¶
RAD is made of the following libraries:
utils
core
events
mal
cii
services
sm
app
appif
utest
itest
All RAD classes and functions are declared within the rad namespace. Classes and functions using CII specific features have an additional namespace: rad::cii. For example: rad::Helper, rad::cii::Publisher.
For detailed information on the libraries classes and methods see the online RAD Doxygen documentation.
3.2.1. utils¶
Library providing common utility classes and functions. It does not depend on other RAD libraries.
Class |
Description |
|---|---|
Helper |
Helper class providing static methods such as: GetHostname(), FindFile(), FileExists(), GetEnvVar(), CreateIdentity(), SplitAddrPort(), GetVersion(). |
DoubleMap |
This class allows to share a map of attributes and associated values between producer threads and one consumer thread. It is used, for example, by OldbAsyncWriter to write asynchronously to the CII OLDB. |
The following free functions in the Helper class are going to be replaced by the Time Library once available (see ESO-331947).
Function |
Description |
|---|---|
GetTime |
Get time of the day as double. |
ConvertToIsoTime |
Covert time of the day to ISO time string. |
GetTimestamp |
Get current time in ISO format. |
3.2.2. core¶
Library providing error handling and logging services. It depends on utils library. Note that logger.hpp file provides macros
Class |
Description |
|---|---|
ErrorCategory |
Class representing RAD errors. |
Exception |
RAD exception. This class is similar to the CII Exception but it does not depend on MAL. |
LogInitializer |
Class to initialize and shutdown log4cplus. |
Logger |
Class used for logging as alternative to log4cplus. It is required for example by M1LCS but should not be used by CII based applications. |
The file logger.hpp providesthe following free functions:
Function |
Description |
|---|---|
Assert |
Assert a condition. If the condition is false, it logs a fatal error. |
LogInitialize |
Initializes log services. |
GetDefaultLogProperties |
To get the default log4cplus configuration. |
GetLogger |
Returns the RAD logger (name = “rad”). |
GetSmLogger |
Returns the RAD State Machine logger (name = “rad.sm”). |
GetAppLogger |
Returns the a generic application logger (name = “app”). |
GetAppLogger |
Returns the log4cplus root logger. |
3.2.3. events¶
Library providing events related services. It does not depend on other RAD libraries.
Class |
Description |
|---|---|
EventT |
Class representing a specific event with template type for the payload. |
AnyEvent |
Class used to represent any event. |
Function |
Description |
|---|---|
getPayload |
Return a reference to the event payload. |
3.2.4. mal¶
Library providing CII messaging services. It depends on core library and requires CII MAL libraries.
Class |
Description |
|---|---|
Publisher |
Class that can be used to publish a topic using CII/ZPB. |
Subscriber |
Class that can be used to subscribe to topic using CII/ZPB. |
Replier |
Class that can be used to receive commands and send replies using CII/ZPB. |
Requestor |
Class that can be used to send commands and receive replies using CII/ZPB. |
Request |
Class representing a command and the associated [error] reply. |
3.2.5. cii¶
Library providing CII services. It depends on core library and requires CII MAL, Config, OLDB, and open-trace libraries.
Class |
Description |
|---|---|
OldbAdapter |
Class that can be used to set/get OLDB attributes in CII OLDB. |
3.2.6. services¶
Library providing messaging and in memory DB services for applications based on the Prototype Software Platform.
Class |
Description |
|---|---|
DbAdapter |
Interface to read/write to a key-value in-memory DB. |
DbAdapterRedis |
Realization of DbAdapter interface for Redis DB. |
MsgHandler |
Base class for a ZMQ message handler. |
MsgReplier |
Class to deal with incoming ZMQ commandss |
MsgRequestor |
Class to send typed ZMQ commands and receive type ZMQ replies. |
MsgRequestorRaw |
Class to send raw ZMQ commands and receive raw ZMQ replies. |
TopicHandler |
Base class for a ZMQ pub/sub topic handler. |
TopicPub |
Class to publish ZMQ topics. |
TopicSub |
Class to subscribe and receive ZMQ topics. |
Note
This library is to be considered obsoleted and replaced by the mal and cii libraries. It is still part of RAD to provide support to old applications like M1LCS which are still based on the Prototype Software Platform.
3.2.7. sm¶
Library providing State Machine services. It depends on mal, services, events, and scxml4cpp libraries.
Class |
Description |
|---|---|
ActionCallback |
Class mapping a void class method to an scxml4cpp::Action object. |
GuardCallback |
Class mapping a boolean class method to an scxml4cpp::Action object. |
ActionGroup |
Base class for classes grouping action methods. |
ThreadActivity |
Base class for do-activities implemented as standard C++ threads. |
PthreadActivity |
Base class for do-activities implemented as Posix threads. |
CoroActivity |
Base class for do-activities implemented as Co-routines. |
ActionMgr |
Base class for instantiating actions and do-activities. |
Signal |
Class for dealing with UNIX signals events. |
Timer |
Class for dealing with time-out events. |
TrsHealth |
Class for dealing with Time Reference Signal health notifications. |
SMEvent |
Class to wrap RAD events into SCXML events. |
SMAdapter |
Facade to the SCXML State Machine engine. |
Note
PthreadActivity allows to set some thread properties like priority, core assignment, scheduling algorithm via the constructor, ThreadActivity does not. CoroActivity is still experimental should allow to implement long lasting I/O operations without blocking using a method invocation instead of a thread.
3.2.8. appif¶
Library containing the MAL ICD for the RAD Interface used by the _app_ library. It contains the specification of the following commands:
Command |
Description |
|---|---|
SetConfig |
Allows to reconfigure one or more configuration attributes by passing a string with the fully qualified identifier and its value or a complete or partial configuration in YAML format. |
GetConfig |
Return the value of a configuration attribute specified in the fully identifier of the parameter. If an empty string is given as identifier, the complete configuration is returned in YAML format. |
LoadConfig |
Load the configuration file specified in the argument. |
SaveConfig |
Save the configuration to file. |
LoadStateMachine |
Load the SCXML state machine model specified in the argument. If the given model is invalid the previous one is maintained. |
LoadStateMachineExtension |
Append to the current SCXML state machine model an extension loaded from file. |
SaveStateMachine |
Save to file the currently loaded SCXML model (including any added extensions). |
GetStateMachine |
Return the currently loaded SCXML state machine model in text format. |
GetTrsHealth |
Return the health status of the Time Reference Signal. |
The MAL ICD XML file appif.xml looks like:
<?xml version="1.0" encoding="UTF-8"?>
<types xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance"
xsi:noNamespaceSchemaLocation="schemas/icd_type_definition.xsd">
<package name="appif">
<exception name="Exception">
<member name="desc" type="string"/>
<member name="code" type="int32_t"/>
</exception>
<interface name="AppCmds">
<method name="SetConfig" returnType="string" throws="Exception">
<argument name="keyval" type="string"/>
</method>
<method name="GetConfig" returnType="string" throws="Exception">
<argument name="key" type="string"/>
</method>
....
<method name="GetStateMachine" returnType="string" throws="Exception">
</method>
</interface>
</package>
</types>
3.2.9. app¶
Library to develop ELT applications implementing the ELT standard interface and the ELT standard state machine. It provides the following classes and files:
File/Class |
Description |
|---|---|
StdCmdsImpl |
Class receiving the MAL RPC calls for the ELT Standard Interface and creating the corresponding State Machine events (listed in eventsStd.rad.ev file). |
AppCmdsImpl |
Class receiving the MAL RPC calls for the RAD Interface and creating the corresponding State Machine events (listed in eventsApp.rad.ev file). |
eventsStd.rad.ev |
Events injected into the State Machine engine and associated to the ELT Standard Interface. |
eventsApp.rad.ev |
Events injected into the State Machine engine and associated to the RAD Interface. |
ActionsStd |
Class implementing callback actions to deal with the events listed in eventsStd.rad.ev. |
ActionsApp |
Class implementing callback actions to deal with the events listed in eventsApp.rad.ev. |
ConfigurableActionGroup |
Class used to notify actions when configuration parameters are changed. It contains the Initialize and Configure virtual methods that can be specialized by the developer in subclasses to reinitialize and reconfigure action callbacks. |
ConfigurableActivity |
Class used to notify activities when configuration parameters are changed. It contains the Initialize and Configure virtual methods that can be specialized by the developer in subclasses to reinitialize and reconfigure activites. |
ConfigurableActionMgr |
Class used to notify actions and activities when configuration parameters are changed. It provides the Initialize and Configure virtual methods that can be used to trigger the re-initialization and reconfiguration of the actions and activities. |
Application |
Class implementing the application initialization and interfacing to the State Machine engine. If needed, it can be customized via inheritance by the developer. |
Config |
Base class to parse common command line options and retrieve configuration parameters. It should specialized via inheritance by a corresponding application Config class. |
DataContext |
Interface containing mandatory methods required by the Application class. This interface should be realized by the developer when implementing the application specific DataContext containing the application configuration and run-time data. |
OldbInterface |
Class to write to the OLDB synchronously via the OldbAdapter. |
OldbAsyncWriter |
Class to write to the OLDB asynchronously via the ActivityUpdateOldb. |
ActivityUpdateOldb |
Class implementing an activity to write periodically to the OLDB. |
3.2.9.1. rad::StdCmdsImpl¶
The rad::StdCmdsImpl class realizes the interface class stdif::AsyncStdCmds generated by MAL from the MAL ICD XML file ELT Standard Commands.
For each RPC call specified in the generated interface class, a method is implemented as shown below for the Exit and SetLogLevel commands:
class StdCmdsImpl : public stdif::AsyncStdCmds {
public:
explicit StdCmdsImpl(rad::SMAdapter& sm);
virtual ~StdCmdsImpl();
virtual elt::mal::future<std::string> Exit() override;
virtual elt::mal::future<std::string> Init() override;
virtual elt::mal::future<std::string> Stop() override;
virtual elt::mal::future<std::string> Reset() override;
virtual elt::mal::future<std::string> GetState() override;
virtual elt::mal::future<std::string> GetStatus() override;
virtual elt::mal::future<std::string> GetVersion() override;
virtual elt::mal::future<std::string> Enable() override;
virtual elt::mal::future<std::string> Disable() override;
virtual elt::mal::future<std::string> SetLogLevel(const std::shared_ptr<stdif::LogInfo>& info) override;
private:
rad::SMAdapter& m_sm;
};
elt::mal::future<std::string> StdCmdsImpl::Exit() {
RAD_TRACE(GetLogger());
auto ev = std::make_shared<EventsStd::Exit>();
m_sm.PostEvent(ev);
return ev->GetPayload().GetReplyFuture();
}
...
elt::mal::future<std::string> StdCmdsImpl::SetLogLevel(const std::shared_ptr<stdif::LogInfo>& info) {
RAD_TRACE(GetLogger());
auto ev = std::make_shared<EventsStd::SetLogLevel>(info->clone());
m_sm.PostEvent(ev);
return ev->GetPayload().GetReplyFuture();
}
The StdCmdsImpl constructor takes as parameter a reference to the State Machine adapter which is needed to inject the event into the State Machine interpreter.
In the StdCmdsImpl::Exit() method the event EventsStd::Exit (which is specified in eventsStd.rad.ev file) is created and injected into the State Machine interpreter via the PostEvent() method. Finally the future provided by the event is returned to CII MAL.
StdCmdsImpl::SetLogLevel() method is similar to the the Exit case with the difference that the SetLogLevel command takes a parameter of type stdif::LogInfo. In this case the corresponding event EventsStd::SetLogLevel is instantiated passing a copy of the parameter as event’s payload.
Note
Data structure parameters (e.g. info in the SetLogLevel command) are passed as std::shared_ptr by MAL but they cannot be shared (see ECII-195) and therefore they must be copied via the clone() method.
3.2.9.2. rad::AppCmdsImpl¶
The class rad::AppCmdsImpl class realizes the interface class appif::AsyncAppCmds generated by MAL from the MAL ICD XML file desceribed in appif .
This class is similar to rad::StdCmdsImpl but, in addition to the State Machine adapter, it takes in the constructor also a reference to the ActionMgr which is needed by the LoadStateMachine() and LoadStateMachineExtension() methods to load a State Machine model or extension.
class AppCmdsImpl : public appif::AsyncAppCmds {
public:
explicit AppCmdsImpl(rad::SMAdapter& sm, rad::ActionMgr& action_mgr);
virtual ~AppCmdsImpl();
virtual elt::mal::future<std::string> GetConfig(const std::string& p) override;
virtual elt::mal::future<std::string> SetConfig(const std::string& p) override;
virtual elt::mal::future<std::string> LoadConfig(const std::string& p) override;
virtual elt::mal::future<std::string> SaveConfig(const std::string& p) override;
virtual elt::mal::future<std::string> GetTrsHealth() override;
virtual elt::mal::future<std::string> LoadStateMachine(const std::string& p) override;
virtual elt::mal::future<std::string> LoadStateMachineExtension(const std::string& p) override;
virtual elt::mal::future<std::string> SaveStateMachine(const std::string& p) override;
virtual elt::mal::future<std::string> GetStateMachine() override;
private:
rad::SMAdapter& m_sm;
rad::ActionMgr& m_action_mgr;
};
elt::mal::future<std::string> AppCmdsImpl::GetConfig(const std::string& p) {
RAD_TRACE(GetLogger());
auto ev = std::make_shared<EventsApp::GetConfig>(p);
m_sm.PostEvent(ev);
return ev->GetPayload().GetReplyFuture();
}
elt::mal::future<std::string> AppCmdsImpl::SetConfig(const std::string& p) {
RAD_TRACE(GetLogger());
auto ev = std::make_shared<EventsApp::SetConfig>(p);
m_sm.PostEvent(ev);
return ev->GetPayload().GetReplyFuture();
}
...
3.2.9.3. eventsStd.rad.ev¶
The eventsStd.rad.ev lists all the events that are associated to the commands in rad::StdCmdsImpl:
# Event definitions for ELT Standard Interface
version: "1.0"
namespace: EventsStd
includes:
- boost/exception_ptr.hpp
- rad/mal/request.hpp
- Stdif.hpp
events:
Disable:
payload: rad::cii::Request<std::string>
...
SetLogLevel:
payload: rad::cii::Request<std::string, std::shared_ptr<stdif::LogInfo>>
From this file the tool radgen generates in the build/ directory the files eventsStd.rad.hpp and eventsStd.rad.cpp containing the C++ classes representing the events to be injected into the State Machine interpreter.
3.2.9.4. eventsApp.rad.ev¶
Similarly to eventsStd.rad.ev, this file lists all the events which are associated to the commands in rad::AppCmdsImpl, the events associated to the Linux signals (CtrlC, SigUsr1), and the Error internal event that can be triggered by the application in case of errors:
# RAD Applications Common Event definitions
version: "1.0"
namespace: EventsApp
includes:
- boost/exception_ptr.hpp
- rad/mal/request.hpp
- Appif.hpp
events:
CtrlC:
doc: Event representing the SIGINT and SIGTERM Linux signals to quit the application.
SigUsr1:
doc: Event representing the SIGUSR1 Linux signal used by Nomad to notify a change in the deployment configuration.
Error:
doc: Event triggered by the ActivityEstimate when an error occurs.
SetConfig:
payload: rad::cii::Request<std::string, std::string>
GetConfig:
payload: rad::cii::Request<std::string, std::string>
LoadConfig:
payload: rad::cii::Request<std::string, std::string>
SaveConfig:
payload: rad::cii::Request<std::string, std::string>
GetTrsHealth:
payload: rad::cii::Request<std::string>
GetStateMachine:
payload: rad::cii::Request<std::string>
SaveStateMachine:
payload: rad::cii::Request<std::string, std::string>
From this file the tool radgen generates in the build/ directory the files eventsApp.rad.hpp and eventsApp.rad.cpp containing the C++ classes representing the events to be injected into the State Machine interpreter.
3.2.9.5. rad::ActionsStd¶
This class is used to group the methods implementing the actions (i.e. callbacks) invoked according to the triggered events (listed in eventsStd.rad.ev) and the current state (as defined in the State Machine Model).
For example it include the method ActionsStd::GetState() which is invoked when the EventsStd::GetState event object is injected in the State Machine interpreter. The EventsStd::GetState object is created by the StdCmdsImpl::GetState() method which is invoked by CII/MAL when stdif::GetState RPC is invoked by a client application.
The following table shows the list of available actions:
Method |
Description |
|---|---|
Exit |
Reply OK to the originator of the command and terminates the Boost ASIO event loop forcing the application to quit. |
GetState |
Reply to the originator of the command with the current active state(s). |
GetStatus |
To be specialized by the application. Reply to the originator of the command with the current active state(s). |
GetVersion |
Reply to the originator of the command with the version of the application specified VERSION env. variable which is injected at compile time by WAF and it is taken from the WAF project wscript file. |
Init |
Initializes all actions and activities by invoking the Initialize() method of rad::ConfigurableActionMgr and reply OK to the originator of the command. |
Enable |
To be specialized by the application. Reply OK to the originator of the command. |
Disable |
To be specialized by the application. Reply OK to the originator of the command. |
Reset |
To be specialized by the application. Reply OK to the originator of the command. |
Stop |
To be specialized by the application. Reply OK to the originator of the command. |
SetLogLevel |
Set the log level for a given logger. Replies OK to the originator of the command if the log level and the logger exist. |
3.2.9.6. rad::ActionsApp¶
This class is used to group the methods implementing the actions (i.e. callbacks) invoked according to the triggered events (listed in eventsApp.rad.ev) and the current state (as defined in the State Machine Model). In addition it includes some actions to deal with the rad::TrsHealth events: TrsHealthGoodEvent and TrsHealthBadEvent.
The following table shows the list of available actions:
Method |
Description |
|---|---|
GetConfig |
Queries the Config object Return the full application configuration or the configuration of the given parameters. |
SetConfig |
Allows to set one configuration parameter of a subset of parameters. |
LoadConfig |
Load the given configuration file. |
SaveConfig |
Save to the given file the complete application configuration. |
TrsHealth |
Logs a warning if the TrsHealthBadEvent event was triggered or an info if the TrsHealthGoodEvent was triggered. |
GetTrsHealth |
Return the health of the Time Reference Signal and the reason. |
GetStateMachine |
Return the State Machine Model in text format. |
SaveStateMachine |
Save to the given file the State Machine Model in text format. |
3.2.9.7. rad::ConfigurableActionGroup¶
The ConfigurableActionGroup specializes the rad::ActionGroup by adding the Initialize() and Configure() methods which can be invoked when the application is initialized (e.g. when Init command is received) or when the configuration changes (e.g. when the SetConfig or LoadConfig commands are received).
An ActionGroup is a class that contains a group of methods which correspond to State Machine actions. These methods are invoked by the State Machine interpreter when entering/exiting a state or when a transition is taken.
3.2.9.8. rad::ConfigurableActivity¶
The ConfigurableActivity specializes the rad::ThreadActivity class by adding the Initialize() and Configure() interfaces which can be used when the application is initialized (e.g. when Init command is received) or when the configuration changes (e.g. when the SetConfig or LoadConfig commands are received).
An Activity is a class that allows to run long lasting tasks in dedicated threads (using std::thread). The thread is started by the State machine interpreter when a state is entered and stopped when the state is exited.
3.2.9.9. rad::ConfigurablePthreadActivity¶
The ConfigurablePthreadActivity specializes the rad::PthreadActivity class by adding the Initialize() and Configure() interfaces which can be used when the application is initialized (e.g. when Init command is received) or when the configuration changes (e.g. when the SetConfig or LoadConfig commands are received).
The difference w.r.t ConfigurableActivity is that this class uses pthread instead of std::thread. pthread API allows to set at creation time the priority and the CPU node where to run the thread.
3.2.9.10. rad::ConfigurableActionMgr¶
The ConfigurableActionMgr specializes the rad::ActionMgr class by adding the Initialize() and Configure() methods which can be used to invoke the Initialize() and Configure() methods of all registered ConfigurableActionGroup, ConfigurableActivity, and ConfigurablePthreadActivity objects.
The ActionMgr is a factory class that can be used instantiates and register ActionGroup and Activity objects.
3.2.9.11. rad::Config¶
The Config class provides methods to store and access the application configuration. It uses CII config-ng to store internally the configuration parameters which in turn uses yaml-cpp. Configuration parameters can be set using constant values, values from environment variables, values from YAML configuration files, or values from command line options.
Each configuration parameter has a string identifier which is defined in the Config.hpp header file. The app library provides the following identifiers:
Identifier |
Type |
Description |
|---|---|---|
cfg/version |
String |
Read only parameter storing the version of the application retrieved from WAF project wscript. |
cfg/modname |
String |
Parameter storing the module name. |
cfg/procname |
String |
Read only parameter storing the process name. It can be changes via the -n command line option. |
cfg/filename |
String |
Parameter to store the file path of the loaded YAML configuration file. |
cfg/log_level |
String |
Configure the log level of the main application logger. |
cfg/log_properties |
String |
File path of the log4cplus property file containing the logging configuration of the application’s loggers. |
cfg/sm_scxml |
String |
File path of the SCXML State Machine model. |
cfg/sm_scxml_append |
String |
File path of the SCXML State Machine model extension. |
cfg/req_endpoint |
String |
URI used to receive the commands using MAL ZPB request/reply protocol. |
cfg/oldb_uri_prefix |
String |
URI used to connect to the CII OLDB. It can contain an initial data point prefix. |
cfg/oldb_conn_timeout |
int |
Timeout in sec to connect to the CII OLDB. |
cfg/trs_health_enabled |
bool |
Flag enabling or disabling the periodic TRS health check. |
The Config class allows to:
Add (AddParam()), read (GetParam()), write (SetParam()), and check (HasParam()) configuration parameters.
Load configuration file (LoadConfig())
Load and applu log4cplus logging properties file (ConfigureLogging())
Merge configurations (MergeConfig())
Parse command line options (ParseOptions())
The Config constructor allows to initialize the logging level for the main application logger. The main application logger name is also used to create the filename of the logging file.
3.2.9.12. rad::DataContext¶
- The DataContext interface allows to:
access the application specific configuration parameters via the GetConfig() method.
publish attributes to the OLDB via the GetOldbInterface() and UpdateDb() methods.
reload the configuration file via the ReloadConfig() method.
This interface should be realized by an application specific DataContext class which should include via composition all the data (runtime and configuration) used and produced by the application’s actions and activities.
3.2.9.13. rad::OldbInterface¶
This base class can be used to write synchronously to the OLDB via the OldbAdapter. It can be specialized by an application specific OldbInterface containing the methods to publish information to the OLDB.
- It contains methods to:
Read attributes from the OLDB (GetValue())
Write attributes to the OLDB (SetValue())
Write the configuration parameters specified in rad::Config to the OLDB (SetConfig()).
Write the application state to the OLDB (SetControlState()).
Write the TRS health status to the OLDB (SetTrsHealth()).
3.2.9.14. rad::OldbAsyncWriter¶
This class can be used to write to the OLDB asynchronously via the rad::ActivityUpdateOldb activity.
- It provides the methods to:
Start and stop the thread that writes to the OLDB (StartWriter() and StopWriter()).
Write single or vector of attributes and related values (Set()).
The attributes/values are stored in a std::map shared with the rad::ActivityUpdateOldb activity which is responsible to remove them and write them to the OLDB.
Note
If the Set() method is invoked faster than the period at which the rad::ActivityUpdateOldb activity is configured to run (and to pop the attributes/values), the old values will be overwritten by the new ones. This is the intended behavior since it is assumed that the most recent value is the most important.
3.2.9.15. rad::ActivityUpdateOldb¶
This class implements an activity to write periodically to the OLDB the attributes and values stored in a std::map data structured shared with the rad::OldbAsyncWriter class.
It can be started/stopped by the rad::OldbAsyncWriter class using the StartWriter() and StopWriter() or the activity can be added in a state of the SCXML State Machine model (the thread will be started by the State Machine interpreter when entering the state and stopped when leaving the state).
3.2.9.16. rad::Application¶
This class groups the Boost ASIO event loop and the State Machine interpreter and provides methods to initialize the application.
It uses configuration information retrieved via the rad::DataContext interface. It is used by the rad::ConfigurableActionMgr since actions and activities may need to be able to inject events into the State Machine interpreter. Therefore is has to be created after the application specific DataContext and before the application specific ActionMgr.
3.2.10. utest¶
Library containing some helper classes to facilitate the creation of unit tests for applications based on the app library. It contains, within the rad::utest namespace, the following classes:
Class |
Description |
|---|---|
ActionMgr |
|
Activity |
Basic implementation of the rad::ConfigurableActivity interface. |
Application |
Specialization of the rad::Application class that allows to initialize the application using a string state machine model (instead of loading the model from file). |
Config |
Specialization of the rad::Config class that initializes the common configuration parameters. |
DataContext |
Basic implementation of the rad::DataContext interface. |
OldbAdapter |
Specialization of the rad::cii::OldbAdapter class that allows to run the CII OLDB in local memory of the application. |
OldbInterface |
Specialization of the rad::OldbInterface class. |
3.2.11. itest¶
Library to facilitate the creation of integration tests with Robot Framework. It provides Robot keywords as: - Robot resource files containing custom Robot keywords. - Python classes implementing custom Robot keywords.
Resource File |
Keywords |
|---|---|
itest.resource |
VerifySendCmdNoParams to send a command with msgsend without parameters. VerifySendCmd to send a command with msgsend with parameters. FileShouldContain to check whether a string is contained in a file. CheckValgrindResults to check for errors in Valgrind memory leak report. |
itestStdIf.resource |
VerifyGetState to verify the stdif::StdCmds::GetState command. VerifyGetStatus to verify the stdif::StdCmds::GetStatus command. VerifyGetVersion to verify the stdif::StdCmds::GetVersion command. VerifyStop to verify the stdif::StdCmds::Stop command. VerifyExit to verify the stdif::StdCmds::Exit command. VerifyInit to verify the stdif::StdCmds::Init command. VerifyEnable to verify the stdif::StdCmds::Enable command. VerifyDisable to verify the stdif::StdCmds::Disable command. VerifyReset to verify the stdif::StdCmds::Reset command. VerifySetLogLevel to verify the stdif::StdCmds::SetLogLevel command. VerifyInterface all the commands above. |
itestAppIf.resource |
VerifyGetConfig to verify the appif::AppCmds::GetConfig command. VerifySetConfig to verify the appif::AppCmds::SetConfig command. VerifyLoadConfig to verify the appif::AppCmds::LoadConfig command. VerifySaveConfig to verify the appif::AppCmds::SaveConfig command. VerifyGetTrsHealth to verify the appif::AppCmds::GetTrsHealth command. VerifyLoadStateMachine to verify the appif::AppCmds::LoadStateMachine command. VerifyLoadStateMachineExtension to verify the appif::AppCmds::LoadStateMachineExtension command. VerifySaveStateMachine to verify the appif::AppCmds::SaveStateMachine command. VerifyGetStateMachine to verify the appif::AppCmds::GetStateMachine command. VerifyCfgInterface to verify all configuration commands. VerifyTrsInterface to verify all TRS commands. VerifySmInterface to verify all State Machine commands. |
itestStartup.resource |
LaunchSubscriberLocal starts a topic subscriber on local machine. TerminateSubscriberLocal terminates a topic subscriber on local machine and logs the stderr and stdout. RunSubscriberLocal run a topic subscriber on local machine until a number of messages are received. LaunchAppLocal starts a RAD application on local machine. LaunchAppWithNameLocal starts a RAD application with different name on local machine. TerminateAppLocal terminates a RAD application running on local machine. SignalAppLocal sends a signal to a RAD application running on local machine. |
Python Classes |
Keywords |
|---|---|
oldb.py |
acquire_oldb Connect to the OLDB. read_from_oldb Read an attributed from the OLDB. should_match_oldb Verifies that an attribute has the given value. should_not_match_oldb Verifies that an attribute does not match the given value. should_match_bool_oldb Verifies that a boolean attribute has the given value. write_to_oldb Write a values to an attribute of the OLDB. Note that these keywords assume that the OLDB service is running. |
3.2.12. scxml4cpp¶
scxml4cpp is an ESO product able to parse and execute an SCXML model. It is made two libraries: the parser and the engine. The parser is based on xerces-c++ and it is used to parse the XML file containing the SCXML State Machine model. The engine is used to interpret at run-time the SCXML State Machine model following the W3C algorithm. Only a subset of the SCXML features are supported. In particular the SCXML standard actions and the possibility to use an interpreted action language is not implemented. Instead actions are mapped to methods of C++ classes.
3.3. Tools¶
The following tools are part of RAD toolkit:
cookiecutters to create C++ skeleton application.
codegen to create events C++ classes.
COMODO to translate State Machine models from SysML/UML to SCXML.
3.3.1. Cookiecutters¶
Cookiecutters is an open-source tool (see Cookiecutter) that is used to generate a RAD based applications from templates. The templates are stored in rad/rad/cpp/template/resource/template directory.
Note
If RAD is cloned from Git, templates can be installed in the $INTROOT/resource/template directory via the waf install command.
If RAD is installed via RPM, templates can be found in $RAD_ROOT/resource/template directory.
3.3.2. radgen¶
radgen is an ESO tool that takes as input a YAML text file and generates C++ classes with events implementation. It is invoked by waf at compile time. Generated files are in the build/ directory.
4. RAD Installation¶
4.1. Environment Configuration¶
To configure environment variables LMOD tool (see LMOD User Guide) is used. It replaces the VLT PECS tool.
LMOD is based on LUA language. The configuration of the env. variables should be stored in the $HOME/modulefiles/private.lua file. For example:
local home = os.getenv("HOME")
local introot = pathJoin(home, "ELT/ELT-INTROOT")
setenv("INTROOT", introot)
setenv("PREFIX", introot)
load("introot")
local cfgpath = pathJoin(home, "ELT/ELT-INTROOT/resource/config")
setenv("CFGPATH", cfgpath)
setenv("CII_LOGS", home)
Note
PREFIX is needed by waf to know where to install binaries and libraries.
INTROOT is usually the same as PREFIX.
CFGPATH can be used to define the paths where applications configuration files are located. It has therefore to include the INTROOT/PREFIX directory.
CII_LOGS is used by CII Logging to store the log files.
To (re-)load your private.lua module from the terminal:
>module load private
4.2. Installation with RPM¶
RAD is distributed as RPMs archived in the eso-elt-projects repo:
elt-rad.x86_64
elt-rad-devel.x86_64
elt-rad-doc.noarch
Note that elt-rad-devel contains only the libraries and binaries. It is recommended to install elt-rad-devel which includes also the templates.
RAD can be installed using the dnf install command as root:
root>dnf install elt-rad-devel.x86_64
If RAD is installed via RPM, the binaries, libraries, interfaces, sources, and templates are located in $RAD_ROOT directory (e.g. /elt/rad directory).
4.3. Installation from GIT¶
4.3.1. Retrieving RAD from GIT¶
RAD is archived in GIT repository: https://gitlab.eso.org/ifw/rad
It can be retrieved with the following command:
>git clone git@gitlab.eso.org:ifw/rad.git
Note
Username and password have to be provided.
4.3.2. Building and Installing RAD¶
RAD can be compiled on a (virtual) machine installed with the ELT DevEnv 3.5.0-7 (or more recent version) with the following commands:
>waf configure
>waf build
RAD can be installed into the $PREFIX directory by:
>waf install
RAD documentation, doxygen and User Manual, can be generated using:
>waf --with-docs
The doxygen documentation is in in rad/build/docs directory. The User Manual is in in rad/build/doc/manual/html directory.
4.3.3. Directory Structure¶
RAD project is organized in the following directories:
Directory |
Description |
|---|---|
doc |
RAD User Manual. |
rad |
RAD Libraries and tools. |
rad/rad/codegen |
Code generator tool to create C++ event classes. |
rad/rad/cpp |
Libraries for C++ Applications |
rad/rad/py |
Libraries for Python Applications (not supported) |
rad/rad/itest |
Library to facilitate development of integration test. |
scxml4cpp |
SCXML State Machine engine for C++. |
scxml4py |
SCXML State Machine engine for Python. |
test |
RAD Integration Tests. |
The Libraries for C++ Applications are organized in the following directories:
Directory |
Description |
|---|---|
utils |
Library providing common utility functions (e.g. FindFile) |
core |
Library providing error handling and logging services. |
events |
Library providing events related services. |
mal |
Library providing CII messaging services. |
cii |
Library providing other CII messaging services like OLDB. |
services |
Library providing ZMQ messaging, DB, and other services. |
sm |
Library providing State Machine service. |
app |
Library to facilitate the development of ELT CII Applications. |
appif |
MAL library containing RAD interface for ELT CII Applications. |
gtlogcap |
Library that allows to capture Unit Test log messages. |
template |
Templates to create RAD based projects and applications. |
_examples |
Examples of applications based on RAD. |
5. RAD Integration Tests¶
RAD has two sets of integration tests located in rad/test directory:
The first set is in rad/test/rad. They use the application described in Examples to test RAD libraries.
The second set is in rad/test/templates and are used to test the templates. These integration tests use the Cookiecutter templates illustrated in the tutorials to generate RAD applications and associated interfaces. Then it compiles the generated modules and executes the generated tests to verify RAD libraries.
These tests are executed daily by the ELT Continuous Integration infrastructure using the latest RAD sources from Git.
6. Tutorial 1: Creating an Application with RAD + CII¶
This tutorial shows how to develop an application for the ELT CII software platform implementing:
the standard ELT State Machine and command interface. The standard command interface is part of the DevEnv.
the RAD app command interface which is part of RAD and it is specified in the rad/cpp/appif SW module: appif
In order to develop the application, the following steps are performed:
Generate WAF Project
Generate Interface Module
(optional) Generate Topic Subscriber Module
Generate Application Module
Generate Integration Test Module
Build and Install Generated Modules
Run Integration Tests
Customize Application, Test, and Interface modules
Note
Step 1 can be skipped if you are adding your application to an existing WAF project.
Step 2 can be skipped if you are adding your application to an existing WAF project which has already the interface module.
6.1. Generate CII WAF Project¶
The build system for the ELT software is based on WAF and requires the creaton of a WAF project. A WAF project is made of a directory (e.g. “hello”) that contains a “wscript” file, declaring the root of a WAF project, and the SW modules organized in sub-directories. See WAF User Manual for more information on WAF projects.
An “hello” WAF project can be generated from a template by executing the following commands and entering the requested information:
> cookiecutter rad/rad/cpp/template/resource/template/rad-waftpl-ciiprj
project_name [hello]: hello
modules_name [hellociiif hellocii hellociisub]:
The input values to the template are:
project_name the name of the WAF project which is used to create the directory containing the project SW modules.
modules_name the name of the SW modules part of this project.
Note
By pressing enter, the default values in square brackets are selected.
If RAD has been installed via RPM, the template is located in $RAD_ROOT/resource/template/rad-waftpl-ciiprj directory.
From the template Cookiecutter generates the directory hello and inside the file wscript. This file contains the WAF project declaration, the features and libraries required to compile this project, and the name of SW modules to compile.
6.2. Generate CII Interface Module¶
All commands, replies, and topics used to communicate between ELT applications, must be specified in dedicated interface modules. For the CII Software Platform, interfaces are specified using MAL XML ICD language.
A MAL interface module containing a copy of the “standard” commands can be created by executing the following commands and entering the requested information:
> cd hello
> cookiecutter ../rad/rad/cpp/template/resource/template/rad-cpptpl-ciiapplif
module_name [hellociiif]: hellociiif
parent_package_name [hello]: hello
The input values to the template are:
module_name the name of the SW module to be generated (which contains the interface specification).
parent_package_name the name of the directory that contains the module. In this case it is the project directory.
From the template Cookiecutter generates the directory hellociiif containing the following files:
File |
Description |
|---|---|
hellociiif/wscript |
WAF file to compile the SW module. |
hellociiif/src/hellociiif.xml |
CII MAL XML file with the interface specification. |
The file hellociiif.xml looks like:
<?xml version="1.0" encoding="UTF-8"?>
<types xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance"
xsi:noNamespaceSchemaLocation="schemas/icd_type_definition.xsd">
<package name="hellociiif">
<struct name="TelPosition">
<member name="ra" type="float" />
<member name="dec" type="float" />
</struct>
</package>
</types>
It specifies an example of data structure, the TelPosition, that can be used to specify the RA/DEC coordinates in commands and pub/sub topics.
This file can be updated with more data structures, exceptions to report errors, and command interfaces (see Tutorial 2 for how to add commands).
For more information on the CII/MAL XML interface definition language, refer to MAL ICD User Manual.
The hellociiif.xml is transformed into C++ code at compile time by the CII/MAL code generator and by Google ProtoBuf compiler. Generated code is located in hello/build directory.
6.3. Generate CII Topic Subscriber Module¶
The subscriber module implements a simple tool can be used to verify that the server application is really publishing the telescope position.
> cd hello
> cookiecutter ../rad/rad/cpp/template/resource/template/rad-cpptpl-ciisub
module_name [hellociisub]: hellociisub
application_name [hellociisub]: helloCiiSub
parent_package_name [hello]: hello
interface_name [hellociiif]: hellociiif
interface_module [hellociiif]: hellociiif
topic_name [TelPosition]: TelPosition
The input values to the template are:
module_name the name of the SW module to generate.
application_name the name of the binary to be produced when compiling the generated module. Note that ELT convention for binaries is lowerCamelCase.
parent_package_name the name of the directory that contains the SW module. In this case it is the project directory.
interface_name the name of SW module containing the interface specification.
interface_module the fully qualified name name of the interface library.
topic_name The name of the topic to subscribe to (and published by the server application).
From the template Cookiecutter generates the directory hellociisub containing one file main.cpp implementing a tool to subscribe to the given topic (e.g. TelPosition) which has been specified in the interface module (e.g. hellociiif).
6.4. Generate CII Application Module¶
RAD provides the templates to create a simple server application implementing the standard ELT State Machine model using the CII Software Platform services.
An application that uses the services of the CII Software Platform can be created by executing the following commands and entering the required information:
> cd hello
> cookiecutter ../rad/rad/cpp/template/resource/template/rad-cpptpl-ciiappl
module_name [hellocii]: hellocii
application_name [hellocii]: helloCii
parent_package_name [hello]: hello
interface_name [hellociiif]: hellociiif
interface_module [hellociiif]: hellociiif
The input values to the template are:
module_name the name of the SW module to generate.
application_name the name of the binary to be produced when compiling the generated module. Note that ELT convention for binaries is lowerCamelCase.
parent_package_name the name of the directory that contains the SW module. In this case it is the project directory.
interface_name the name of SW module containing the interface specification.
interface_module the fully qualified name name of the interface library.
From the template Cookiecutter generates the directory hellocii containing the following files:
File |
Description |
|---|---|
wscript |
WAF file to build the application. |
resource/config/hellocii/config.yaml |
YAML application configuration file. |
resource/config/hellocii/sm.xml |
SCXML file with the State Machine model. |
resource/config/hellocii/log.properties |
Logging configuration file. |
src/actionMgr.[hpp|cpp] |
Class responsible for instantiating actions and activities. |
src/config.[hpp|cpp] |
Class loading YAML configuration file. |
src/dataContext.[hpp|cpp] |
Class used to store application run-time data shared between action classes. |
src/olddbInterface.[hpp|cpp] |
Class interfacing with the Online DB. |
src/logger.[hpp|cpp] |
Default logger definition. |
src/main.cpp |
Application entry function. |
test/testActionMgr.cpp |
Example of Unit Test. |
6.4.1. wscript¶
This file is used by WAF to build the application binary.
from wtools.module import declare_cprogram
declare_cprogram(target='helloCii',
features='radgen',
use=('BOOST yaml-cpp log4cplus cpp-netlib-uri xerces-c config-ng.cpp.config-ng '
'rad.cpp.utils rad.cpp.core rad.cpp.mal rad.cpp.cii rad.cpp.app rad.cpp.sm '
'rad.cpp.events rad.cpp.appif-cxx hellociiif-cxx '
'trs-common.ptpmonLib.cpp gsl'))
It specifies the target binary name hellocii, which tools to use for building (e.g. radgen to transform .rad.ev files into C++ classes), and which libraries to link:
BOOST for event loop etc.
yaml-cpp to load YAML configuration files.
log4cplus for logging.
xerces-c required to parse SCXML State Machine Model.
config-ng.cpp.config-ng CII Config Service.
rad.cpp.utils, rad.cpp.core, …, RAD libraries.
hellocii-cxx CII/MAL generated interface library.
6.4.2. config.yaml¶
This file contains the application configuration in YAML format.
cfg:
req_endpoint : "zpb.rr://127.0.0.1:12081/"
sm_scxml : "config/hellocii/sm.xml"
log_properties : "config/hellocii/log.properties"
oldb_uri_prefix : "cii.oldb:/elt/"
oldb_conn_timeout : 1
trs_health_enabled : 0
These configuration parameters correspond to the attributes defined in the rad::Config class. This set of parameters can be extended by adding application specific parameters.
6.4.3. log.properties¶
Logging APIs are provided by log4cplus library. Logging service can be configured via the following configuration file.
log4cplus.logger.malZpbClientAsyncImpl=ERROR
log4cplus.logger.malZpbServer=ERROR
log4cplus.logger.rad=INFO
log4cplus.logger.rad.sm=INFO
log4cplus.logger.scxml4cpp=INFO
log4cplus.logger.hellocii=INFO
In the file it is possible to specify the log level for each logger (e.g. rad, scxml4cpp, hellocii). The log appenders, used to print the log messages to console or save to file, are specified via API for the root logger and inherited by all the loggers.
The default application logger is specified in logger.hpp|cpp files.
6.4.4. sm.xml¶
This file contains the SCXML representation of the standard ELT State Machine model.
<?xml version="1.0" encoding="us-ascii"?>
<!-- hellocii StateMachine -->
<scxml xmlns="http://www.w3.org/2005/07/scxml" xmlns:customActionDomain="http://my.custom-actions.domain/CUSTOM"
version="1.0" initial="On">
<state id="On">
<initial>
<transition target="On::NotOperational"/>
</initial>
<state id="On::NotOperational">
<initial>
<transition target="On::NotOperational::NotReady"/>
</initial>
<state id="On::NotOperational::NotReady">
<transition event="EventsStd.Init" target="On::NotOperational::Ready">
<customActionDomain:ActionsStd.Init name="ActionsStd.Init"/>
</transition>
</state>
<state id="On::NotOperational::Ready">
<transition event="EventsStd.Enable" target="On::Operational">
<customActionDomain:ActionsStd.Enable name="ActionsStd.Enable"/>
</transition>
</state>
<transition event="EventsApp.LoadConfig">
<customActionDomain:ActionsApp.LoadConfig name="ActionsApp.LoadConfig"/>
</transition>
</state>
<state id="On::Operational">
<transition event="EventsStd.Disable" target="On::NotOperational::Ready">
<customActionDomain:ActionsStd.Disable name="ActionsStd.Disable"/>
</transition>
</state>
<transition event="EventsStd.Reset" target="On::NotOperational::NotReady">
<customActionDomain:ActionsStd.Reset name="ActionsStd.Reset"/>
</transition>
...
<transition event="EventsApp.SetConfig">
<customActionDomain:ActionsApp.SetConfig name="ActionsApp.SetConfig"/>
</transition>
</state>
<final id="Off">
</final>
</scxml>
The State Machine consists of the following states:
A composite outer state On indicating that the application has started.
A composite state On/NotOperational indicating that the application and controlled devices cannot be used yet for operation.
A leaf state On/NotOperational/NotReady indicating that the application and devices have not been fully initialized yet.
A leaf state On/NotOperational/Ready indicating that the application has been initialized (but the devices may not be ready).
A composite state On/Operational indicating that the application and controlled devices provide all operational functionalities.
A final pseudo-state Off to indicate that the application has terminated.
The State Machine presents the following transitions:
It is possible to move from On/NotOperational/NotReady to On/NotOperational/Ready via the EventsStd.Init event.
It is possible to move from On/NotOperational/Ready to On/Operational via the EventsStd.Enable event.
It is possible to move from On/Operational to On/NotOperational/Ready via the EventsStd.Disable or the EventsStd.Stop event.
It is possible to move from any state back to On/NotOperational/NotReady via the EventsStd.Reset event.
It is possible to terminate the application from any state via the EventsStd.Exit or the EventsApp.CtrlC events.
It is possible to move from any state to On/NotOperational/NotReady via the EventsStd.Reset event.
It is possible to move from any state to On/NotOperational/Ready via the EventsStd.Init event.
All the remaining transitions are so called “internal transition”: they do not trigger a change of state (e.g. EventsStd.GetState).
The initial state after the application has started is: On/NotOperational/NotReady.
Note
The SCXML State Machine model is Software Platform independent. The same model is used for the CII Software Platform and for the Prototype Software Platform. The SCXML engine is also Software Platform independent: scxml4cpp is also used in WSF2 for the VLT Software Platform.
The app library provides the events EventsStd.* (e.g. EventsStd.Init) and EventsApp.* (e.g. EventsApp.SetConfig) with the eventsStd.rad.ev and eventsApp.rad.ev files together with a basic implementation of the actions ActionsStd.* (e.g. ActionsStd.Reset) and ActionsApp.* (e.g. ActionsApp.SetConfig) via the rad::ActionsStd and rad::ActionsApp classes.
6.4.5. actionMgr.hpp|cpp¶
The ActionMgr class is responsible, via the CreateActions and CreateActivies methods, for instantiating the objects implementing the actions (callbacks) and the activities (e.g. threads).
In this part of the tutorial only the actions provided by app library are used and therefore the ActionMgr::CreateActions() method simply invokes the base class helper methods to create the ActionsStd and ActionsApp objects and register the associated callbacks:
void ActionMgr::CreateActions(rad::Application& appl) {
RAD_TRACE(GetLogger());
CreateActionsForStdEvents(appl, m_data);
CreateActionsForAppEvents(appl, m_data);
}
m_data represents the application runtime and configuration data object which is instantiated in the main.cpp and it is provided to the ActionMgr via constructor. The appl reference allows to interact with the event loop and the State Machine interpreter.
The second part of the tutorial (Tutorial 2: Customizing an Application with RAD + CII) illustrates how to add new commands, actions, and activities.
6.4.6. config.hpp|cpp¶
The Config class (which inherits from rad::Config class provided by the app library) is responsible for providing access to the application configuration and for initializing the configuration parameters with default values in the constructor.
Durign the initialization the following order should be followed:
Default values defined in config.hpp
Environment Variables
Application configuration file config.yaml
Command line parameters
The Config class constructor initializes the configuration attributes with the default values and, if applicable, the environment variables values.
The Config class is usually a member of the DataContext (dataContext.hpp|cpp) class which is instantiated in main.cpp.
The command line options are parsed and the YAML configuration file loaded as part of the application start-up sequence coded in the rad::Application class Init() methods.
Note
Due to CII limitations, configuration files are loaded only from directories specified in the CFGPATH environment variable.
6.4.7. oldbInterface.hpp|cpp¶
The OldbInterface class inherits from the rad::OldbInterface class and should be used to read/write application specific configuration and runtime data to the OLDB synchronously.
The OldbInterface constructor takes as parameter a string representing the prefix to be added to all the attributes identifiers before accessing the OLDB.
The OldbInterface class is usually member of the DataContext (dataContext.hpp|cpp) class which is instantiated in main.cpp.
6.4.8. dataContext.hpp|cpp¶
The DataContext class allows to share run-time and configuration data among actions and activities. This class allows also to write publish the data to the OLDB via the OldbInterface class.
The DataContext object is instantiated in main.cpp.
6.4.9. logger.hpp|cpp¶
log4cplus library provides the possibility to associate logs to different loggers. This features allows to set the log level (and therefore enable/disable logging) for given loggers. For example it is possible to enable logging for an application secondary thread and disable the logging for the main thread by using different loggers: one associated to the main thread and one associated to the secondary thread.
It suggested to use, for the main application thread, a common global logger which takes the name from the SW module name and it is defined in the logger.hpp file.
const std::string LOGGER_NAME = "hellocii";
The logger can be obtained from the free function implemented in logger.cpp:
log4cplus::Logger& GetLogger() {
static log4cplus::Logger logger = elt::log::CiiLogManager::GetLogger(LOGGER_NAME);
return logger;
}
For secondary threads (e.g. Activity classes) or in case of loggers dedicated to given classes, it is suggested to declare the logger as class attribute and use it in the logging macros. The name of specialized logger should use the SW module name as prefix (e.g. “hellocii.ActivityName”) to allow an easy enabling/disabling of all application logs.
Note
There is an overhead in using the log4cplus::Logger::getInstance(loggerName) method and therefore it is preferable to use the GetLogger() function or to create the logger once and store it in a member attribute.
The RAD_ASSERT macros use the rootLogger.
6.4.10. main.cpp¶
The main() function of an application based on RAD is responsible for creating all the required objects, initializing the services and start the event loop.
It starts by initializing the logging library and creating the application runtime and configuration data: the DataContext object. Note that the DataContext class is composed of the Config (see config.hpp|cpp) and OldbInterface (see oldbInterface.hpp|cpp) classes to allow to retrieve configuration information and to publish data to the OLDB.
It then creates the application object app (see rad::Application) and the action_mgr (see actionMgr.hpp|cpp) objects and initializes the application via the appl.Init() method. The Init() method performs the following tasks:
parse the command line options
load the YAML configuration file
apply the logging properties
publish the configuration to the OLDB
create the object to deal with the incoming requests
create the State Machine actions and activities objects
load the State Machine model (and the extension if provided)
register the application state publisher to the OLDB
int main(int argc, char *argv[]) {
try {
/*
* Init logging and create data context which
* includes the configuration information.
*/
rad::LogInitializer log_initializer;
hellocii::DataContext data;
/*
* Create state machine based application object.
*/
rad::Application appl(hellocii::CONFIG_DEFAULT_MODNAME, data);
/*
* Create actions and activities invoked by the state machine.
*/
hellocii::ActionMgr action_mgr(data);
if (appl.Init(argc, argv, action_mgr) == false) {
return EXIT_SUCCESS; // request for help
}
...
At this point the application specific default reject handlers and the supported MAL interfaces are registered.
The reject handlers allow to reply with a reject message every time the associated command is received in a state that has no valid transition to deal with the command. For example, from the State Machine model (see sm.xml) of this example application it is possible to verify that the LoadConfig is accepted only in the On/NotOperational/NotReady state. Without the reject handler, if the LoadConfig is received in any other state than On/NotOperational/NotReady, it would be ignored (with a log message but without any notification to the originator of the command).
For this example application only two MAL inetrfaces are registered: the one to deal with ELT Standard Interface (rad::StdCmdsImpl) and the one for the RAD Application Interface (rad::AppCmdsImpl).
/*
* Application specific customizations:
* - reject event handlers
* - MAL RPC interfaces
*/
appl.RegisterDefaultRequestRejectHandler<EventsStd::Init>();
appl.RegisterDefaultRequestRejectHandler<EventsStd::Enable>();
appl.RegisterDefaultRequestRejectHandler<EventsStd::Disable>();
appl.RegisterDefaultRequestRejectHandler<EventsApp::LoadConfig>();
appl.RegisterService<stdif::AsyncStdCmds>("StdCmds",
std::make_shared<rad::StdCmdsImpl>(appl));
appl.RegisterService<appif::AsyncAppCmds>("AppCmds",
std::make_shared<rad::AppCmdsImpl>(appl, action_mgr));
The last part is dedicated to start the asynchronous OLDB writer and run the application. The rad::Application::Run() methods starts the State Machine interpreter and the BOOST ASIO event loop.
/*
* Start OLDB async writer thread.
*/
data.GetOldbAsyncWriter().StartWriter();
/*
* Start State Machine interpreter and the
* event loop.
*/
appl.Run();
/*
* Stop OLDB async writer thread.
*/
data.GetOldbAsyncWriter().StopWriter();
} catch (std::exception& e) {
LOG4CPLUS_ERROR(hellocii::GetLogger(), e.what());
return EXIT_FAILURE;
} catch (...) {
LOG4CPLUS_ERROR(hellocii::GetLogger(), boost::current_exception_diagnostic_information());
return EXIT_FAILURE;
}
return EXIT_SUCCESS;
}
Note
The Run() method returns only when there are no more callbacks registered in BOOST ASIO or when it is stopped (e.g. with CTRL-C signal or via the Exit command).
6.5. Build and Install CII Generated Modules¶
Generated code can be compiled and installed by executing the following commands:
> cd hello
> waf configure
> waf build install
Note
Make sure that the PREFIX environment variable is set to the installation directory (which usually coincides with the INTROOT).
6.6. CII Applications Execution¶
In order to execute the generated application, the CII services must be started first. Since starting and stopping the CII services require root permission, the eltdev user should be added in the /etc/sudoers file with the entries to execute the cii-services start all and cii-services stop all commands.
To start the CII services as eltdev:
eltdev> sudo cii-services start all
Note
It is possible to monitor the status of the CII services via the commands cii-services info and cii-services status. To verify that the CII OLDB is working one can start the oldbGui panel.
After the CII services have been started, the generated CII application can be executed in a dedicated terminal:
> helloCii -c config/hellocii/config.yaml -l DEBUG
The application state can be queried by running on a different terminal the following command:
> msgsend -u zpb.rr://127.0.0.1:12081/StdCmds ::stdif::StdCmds::GetState
The default application command line options are as follow:
-h [ --help ] Print help messages
-n [ --proc-name ] arg Process name
-l [ --log-level ] arg Log level: ERROR, WARN, INFO, DEBUG, TRACE
-c [ --config ] arg Configuration filename
-o [ --oldb-prefix ] arg OLDB URI prefix
Note
Make sure that the CFGPATH environment variable contains the path(s) where the configuration files are located and that the directory and files exist.
Make sure that the CII_LOGS environment variable is defined with the path where the log file will be located and that the directory exists.
To terminate the application it is enough to send an Exit command (or press Ctrl-C in the application’s terminal):
> msgsend -u zpb.rr://127.0.0.1:12081/StdCmds ::stdif::StdCmds::Exit
6.7. CII Applications Debugging with Eclipse¶
For each waf project it is possible to create an Eclipse C/C++ project via the following command:
> cd hello
> waf eclipse
From a terminal Eclipse can be started and the project imported via:
From the “File” menu select the “Import” option
Select “Existing Projects into Workspace”
Click on “Next” button
Select the “hello” root directory using the “Browse” button
Click on “Finish” button
Create a Debugging Configuration for the hellocii application:
From the “Run” menu select the “Debug Configurations…” option
Right click on “C/C++ Application” and select “New Configuration”
Enter Name = hellocii
In the “Main” tab enter: Project = hello
In the “Main” tab enter: C/C++ Application = /home/landolfa/EELT/TUTORIAL/hello/build/hellocii/hellocii
In the “Arguments” tab enter: Program arguments = -l DEBUG -c hellocii/config.yaml
Click on “Debug” button to start debugging
6.8. Unit Tests Execution¶
An example of unit test for the class ActionMgr is generated by the template in the hellocii/test directory. In order to execute the Unit Tests:
> cd hello
> waf test
To force the re-execution of all unit tests:
> waf test --alltests
To run the unit tests with valgrind to detect memory leaks:
> waf test --alltests --valgrind
6.9. Generate CII Integration Test Module¶
RAD provides templates to generate some basic integration tests based on Robot Framework. The tests verify the “standard” commands and check for memory leaks.
A module containing some basic integration tests to verify applications using CII Software Platform can be created by executing the following commands and entering the requested information:
> cd hello
> cookiecutter ../rad/rad/cpp/template/resource/template/rad-robtpl-ciitest/
module_name [hellociitest]: hellociitest
module_to_test [hellocii]: hellocii
application_to_test [hellocii]: helloCii
interface_prefix [hellociiif]: hellociiif
application_to_send [msgsend]: msgsend
The input values to the template are:
module_name the name of the SW module to be generated (which contains the tests).
module_to_test the name of the SW module to test.
application_to_test the name of application to test.
interface_prefix the name of the interface module.
application_to_send the name of the application to use in the tests to send commands. By default it is the python msgsend one installed in the ELT DevEnv.
From the template Cookiecutter generates the directory hellociitest containing the following files:
File |
Description |
|---|---|
hellociitest/etr.yaml |
Configuration file to be able to run the tests with ETR tool. |
hellociitest/src/genStdcmds.robot |
Tests verifying the “standard” commands. |
hellociitest/src/genMemleaks.robot |
Similar to genStdcmds.robot tests but executed with Valgrind tool to check for memory leaks. |
hellociitest/src/genUtilities.txt |
Utility functions and configuration parameters used by the tests. |
6.10. Execute CII Integration Tests¶
Integration tests can be executed via Extensible Test Runner (ETR) tool (see ETR User Manual) or directly using Robot Framework.
In the first case:
> cd hellociitest
> etr
Note
ETR should be part of the ELT DevEnv or it should be installed from RPM. It is possible to run the integration tests without ETR using directly the Robot Framework tool (e.g.: cd hellociitest/src/; robot genStdcmds.robot)
Using Robot directly:
> cd hellociitest/src
> robot *.robot
6.11. Doxygen Documentation Generation¶
In order to generate the doxygen documentation:
> cd hello
> waf --with-docs
The generated html files are in hello/build/docs directory.
7. Tutorial 2: Customizing an Application with RAD + CII¶
This tutorial explains how to customize an application created in Tutorial 1: Creating an Application with RAD + CII. It shows how to add a custom command with associated actions, an activity, and run-time data to be shared between actions and activities.
The resulting application is similar to the exmalserver example that can be found in rad/rad/cpp/_examples directory.
7.1. Add a Command¶
As example, we introduce a new Preset command that should emulate the pointing of a telescope.
In order to add a new command to the application the following files have to be updated/created:
update hellociiif/src/hellociiif.xml (CII Interface Module)
create hellocii/src/events.rad.ev (CII Application Module)
create hellocii/src/cmdsImpl.hpp (CII Application Module)
update hellocii/resource/config/sm.xml (CII Application Module)
create hellocii/src/actionsPreset.hpp|cpp (CII Application Module)
update hellocii/src/actionMgr.cpp (CII Application Module)
update hellocii/src/main.cpp (CII Application Module)
7.1.1. Update CII Interface Module¶
If a command has to be added (modified, or removed), the MAL interface (hellociiif/src/hellociiif.xml) has to be edited.
For example, in order to introduce a new PresetCmds interface with a Preset command that takes 2 parameters (e.g. ra and dec) and that can return an exception, the following XML should be added:
...
<exception name="ExceptionErr">
<member name="desc" type="string"/>
<member name="code" type="int32_t"/>
</exception>
<interface name="PresetCmds">
<method name="Preset" returnType="string" throws="ExceptionErr">
<argument name="pos" type="nonBasic" nonBasicTypeName="TelPosition" />
</method>
</interface>
...
7.1.2. Update CII Application Module¶
7.1.3. Create events.rad.ev¶
In order to be able to process the Preset command with the State Machine, the event associated to command should be added to a .rad.ev file.
If the .rad.ev file is not available, it has to be first to be created:
> cd hello/hellocii/src
> touch events.rad.ev
and then the following content copied:
# Event definitions for hellocii application
version: "1.0"
namespace: Events
includes:
- boost/exception_ptr.hpp
- rad/mal/request.hpp
- Hellociiif.hpp
events:
Preset:
doc: event triggered when the Preset command is received.
payload: rad::cii::Request<std::string, std::shared_ptr<hellociiif::TelPosition>>
For each event it is possible to specify:
an optional description and
the event payload type
For CII commands, the event payload is associated to the command and reply payloads. RAD provides a wrapper class, rad::cii::Request, that allows to access the command payload and to set the replay payload. The wrapper class takes two templates parameters:
the data type of the reply parameter
the data type of the command parameter (optional)
In this case the Preset event has std::string reply and std::shared_ptr<hellociiif::TelPosition> command parameter.
Similarly to the eventsStd.rad.ev and eventsApp.rad.ev, this file will be transformed during compilation by radgen tool into events.rad.cpp and events.rad.hpp files containing the C++ classes associated to the events. The generated C++ files are located in hello/build/hellocii/src directory and look like:
namespace Events {
...
/**
* event triggered when the Preset command is received.
*/
class Preset final : public rad::AnyEvent {
public:
static constexpr char const* ID = "Events.Preset";
...
7.1.4. Create cmdsImpl.hpp¶
The CmdsImpl class implements the CII/MAL/ZPB interface specified in CII Interface module. In the constructor it takes a reference to the rad::SMAdapter used to inject the event associated to the command into the State Machine engine.
If the class is not available it has first to be created:
> cd hello/hellocii/src
> touch cmdsImpl.hpp
and then the following content copied:
#ifndef HELLOCIISERVER_CMDS_IMPL_HPP
#define HELLOCIISERVER_CMDS_IMPL_HPP
#include "events.rad.hpp"
#include "logger.hpp"
#include <rad/exceptions.hpp>
#include <rad/smAdapter.hpp>
namespace hellocii {
class CmdsImpl : public hellociiif::AsyncPresetCmds {
public:
explicit CmdsImpl(rad::SMAdapter& sm) : m_sm(sm) {
RAD_TRACE(GetLogger());
}
virtual ~CmdsImpl() {
RAD_TRACE(GetLogger());
}
virtual elt::mal::future<std::string> Preset(const std::shared_ptr<hellociiif::TelPosition>& pos) override {
RAD_TRACE(GetLogger());
auto ev = std::make_shared<Events::Preset>(pos->clone());
m_sm.PostEvent(ev);
return ev->GetPayload().GetReplyFuture();
}
private:
rad::SMAdapter& m_sm;
};
} // namespace hellociiserver
#endif // HELLOCIISERVER_CMDS_IMPL_HPP
Similarly to the rad::StdCmdsImpl and rad::AppCmdsImpl, the CmdsImpl class realizes the corresponding hellociiif::AsyncPresetCmds MAL interface by implementing the CmdsImpl::Preset() method. The method creates the corresponding Events::Preset event and inject it into the State Machine. The event takes as payload a copy of the command’s argument (hellociiif::TelPosition>& pos).
7.1.4.1. Update sm.xml¶
The State Machine model can be updated by adding a new Presetting state. This state indicates that a preset command is being executed. Since Preset involves moving the telescope axes, the Presetting state is added as substate of Operational and it can be reached once the system has been initialized (e.g. from On/Operation/Idle). The resulting State Machine model in hellocii/resource/config/hellocii/sm.xml should look like:
...
<state id="On::Operational">
<initial>
<transition target="On::Operational::Idle"/>
</initial>
<state id="On::Operational::Idle">
<transition event="Events.Preset" target="On::Operational::Presetting"/>
</state>
<state id="On::Operational::Presetting">
<onentry>
<customActionDomain:ActionsPreset.Start name="ActionsPreset.Start"/>
</onentry>
</state>
...
</state>
...
Note that when entering the state Presetting, the new action ActionsPreset.Start will be executed. This action should be responsible for initiating the preset of the telescope.
7.1.4.2. Create actionsPreset.hpp|cpp¶
The new action ActionsPreset.Start added to the State Machine model can be implemented by by adding a new method to an existing rad::ConfigurableActionGroup class or by creating a dedicated a new one. To create a new one:
> cd hello/hellocii/src
> touch actionsPreset.hpp
> touch actionsPreset.cpp
The header should look like:
#ifndef HELLOCII_ACTION_PRESET_HPP
#define HELLOCII_ACTION_PRESET_HPP
#include <rad/configurableActionGroup.hpp>
#include <rad/application.hpp>
namespace hellocii {
class DataContext;
/**
* This class contains the implementation of the actions dealing with
* the Preset use case.
*/
class ActionsPreset : public rad::ConfigurableActionGroup {
public:
/**
* Constructor.
*
* @param[in] sm Reference to the SM Adapter used to inject internal events.
* @param[in] data Data shared within the application among actions and activities.
*/
ActionsPreset(rad::Application& sm, DataContext& data);
/**
* Method invoked when Init command is received to re-initialize
* the actions class attributes.
*/
void Initialize() override;
/**
* Method invoked when SetConfig or LoadConfig command is received
* to re-configure the actions class attributes.
*
* @param keys Modified parameters. Empty vector means all params have changed.
*/
void Configure(const std::vector<std::string>& keys) override;
void Start(scxml4cpp::Context* c);
ActionsPreset(const ActionsPreset&) = delete; //! Disable copy constructor
ActionsPreset& operator=(const ActionsPreset&) = delete; //! Disable assignment operator
private:
rad::Application& m_appl;
DataContext& m_data;
};
} // namespace hellocii
#endif // HELLOCII_PRESET_STD_HPP
The source should look like:
#include "actionsPreset.hpp"
#include "dataContext.hpp"
#include "logger.hpp"
#include <events.rad.hpp>
#include <rad/mal/request.hpp>
#include <rad/smEvent.hpp>
namespace hellocii {
ActionsPreset::ActionsPreset(rad::Application& appl, DataContext& data)
: rad::ConfigurableActionGroup("ActionsPreset"),
m_appl(appl),
m_data(data) {
RAD_TRACE(GetLogger());
}
void ActionsPreset::Initialize() {
RAD_TRACE(GetLogger());
}
void ActionsPreset::Configure(const std::vector<std::string>& keys) {
RAD_TRACE(GetLogger());
}
void ActionsPreset::Start(scxml4cpp::Context* c) {
RAD_TRACE(GetLogger());
const Events::Preset::payload_t* req = rad::GetLastEventPayloadNothrow<Events::Preset>(c);
if (req == nullptr) {
LOG4CPLUS_ERROR(GetLogger(), "Preset event has no associated request!");
return;
}
std::shared_ptr<hellociiif::TelPosition> req_params = req->GetRequestPayload();
float ra = req_params->getRa();
float dec = req_params->getDec();
LOG4CPLUS_DEBUG(GetLogger(), "Received Preset to RA " << ra << " DEC " << dec);
req->SetReplyValue("Preset Started");
}
} // namespace hellocii
The Start action implementation logs the RA/DEC and replies back to the originator of the Preset command the message “Preset Started”.
7.1.4.3. Update actionMgr.cpp¶
Once the action has been implemented it can be added to the ActionMgr class so that it is created at application start-up. The method CreateActions() in hellocii/src/actionMgr.cpp can be updated as follows:
#include "actionsPreset.hpp"
...
void ActionMgr::CreateActions(rad::Application& appl) {
...
ActionsPreset* actions_preset = new ActionsPreset(appl, m_data);
if (actions_preset == nullptr) {
LOG4CPLUS_ERROR(GetLogger(), "Cannot create ActionsPreset object.");
return;
}
AddActionGroup(actions_preset);
...
RegisterAction<ActionsPreset>("ActionsPreset.Start",
&ActionsPreset::Start, actions_preset);
...
}
The code first create the ActionsPreset object that groups all the actions related to the Preset use case and then register the ActionsPreset::Start method with the name “ActionsPreset.Start”. In this way the State Machine interpreter can invoke the correct C++ method when interpreting the “ActionsPreset.Start” statement in the SCXML State Machine model.
Note
If the name of an action in the SCXML State Machine model does not match the ones registered in the ActionMgr, the SCXML parser will log a warning.
7.1.4.4. Update main.cpp¶
Since we added a new MAL interface (i.e. PresetCmds), it has to be registered by updating the hellocii/src/main.cpp:
#include "cmdsImpl.hpp"
...
int main(int argc, char *argv[]) {
try {
...
appl.RegisterDefaultRequestRejectHandler<Events::Preset>();
...
appl.RegisterService<hellociiif::AsyncPresetCmds>("PresetCmds",
std::make_shared<hellocii::CmdsImpl>(appl));
Also the default reject handler for the Preset command has been added.
7.2. Add an Activity¶
After having added the Preset command (see Add a Command), we introduce an activity that is started after entering the Presetting state. This activity simulates the moving of the telescope axis. The activity takes some time (long lasting task) and when it is completed, it triggers an internal event, MoveDone, to go back to the Idle state. This behavior can be achieved by updating/creating the following files:
update hellocii/resource/config/hellocii/log.properties (CII Application Module)
update hellocii/src/events.rad.ev (CII Application Module)
update hellocii/resource/config/hellocii/sm.xml (CII Application Module)
create hellocii/src/activityMoving.hpp|cpp (CII Application Module)
update hellocii/src/actionMgr.cpp (CII Application Module)
update hellocii/test/testActionMgr.cpp (CII Application Module)
7.2.1. Update CII Application Module¶
7.2.1.1. Update log.properties¶
A dedicate logger for the activity ActivityMoving is added to hellocii/resource/config/hellocii/log.properties file and configured as follows:
...
log4cplus.logger.hellocii.ActivityMoving=DEBUG
...
7.2.1.2. Update events.rad.ev¶
The MoveDone and MoveError events (without payload) are added in hellocii/src/events.rad.ev file to indicate that the activity has terminated or an error has occurred while moving:
events:
...
MoveDone:
doc: event triggered when the ActivityMoving has terminated.
MoveError:
doc: event triggered when an error occurs while moving.
...
7.2.1.3. Update sm.xml¶
The State Machine model is updated with the invocation of the activity ActivityMoving and the new transitions from Presetting to Idle on event MoveDone and from Presetting to NotOperation/NotReady in case of errors:
<state id="On::Operational">
<initial>
<transition target="On::Operational::Idle"/>
</initial>
<state id="Idle">
<transition event="Events.Preset" target="On::Operational::Presetting"/>
</state>
<state id="On::Operational::Presetting">
<onentry>
<customActionDomain:ActionsPreset.Start name="ActionsPreset.Start"/>
</onentry>
<invoke id="ActivityMoving"/>
</state>
<transition event="Events.MoveDone" target="On::Operational::Idle"/>
<transition event="Events.MoveError" target="On::NotOperational::NotReady"/>
...
</state>
...
7.2.1.4. activityMoving.hpp|cpp¶
The activity that simulates the telescope axes movement can be implemented using a dedicated thread. The thread is implemented by the Run() method of the ActivityMoving class.
> cd hello/hellocii/src
> touch activityMoving.hpp
> touch activityMoving.cpp
The class can be implemented with the following code:
#include "logger.hpp"
#include <rad/activity.hpp>
#include <rad/smAdapter.hpp>
#include <string>
namespace hellocii {
class DataContext;
class ActivityMoving : public rad::ThreadActivity {
public:
ActivityMoving(const std::string& id,
rad::SMAdapter& sm,
DataContext& data);
virtual ~ActivityMoving();
void Run() override;
ActivityMoving(const ActivityMoving&) = delete; //! Disable copy constructor
ActivityMoving& operator=(const ActivityMoving&) = delete; //! Disable assignment operator
private:
log4cplus::Logger m_logger = log4cplus::Logger::getInstance(LOGGER_NAME + ".ActivityMoving");
rad::SMAdapter& m_sm;
DataContext& m_data;
};
} // namespace hellocii
The Run() method waits 10s and then trigger the MoveDone event.
#include "activityMoving.hpp"
#include "dataContext.hpp"
#include "config.hpp"
#include "oldbInterface.hpp"
#include <events.rad.hpp>
#include <rad/mal/publisher.hpp>
namespace hellocii {
ActivityMoving::ActivityMoving(const std::string& id,
rad::SMAdapter& sm,
DataContext& data)
: rad::ThreadActivity(id),
m_sm(sm),
m_data(data) {
}
ActivityMoving::~ActivityMoving() {
}
void ActivityMoving::Run() {
RAD_TRACE(m_logger);
int i = 0;
const int max_iterations = 10;
while (IsStopRequested() == false) {
LOG4CPLUS_DEBUG(m_logger, "Moving ALT/AZ ...");
using namespace std::chrono;
std::this_thread::sleep_for(1s);
if (i == max_iterations) {
LOG4CPLUS_INFO(m_logger, "Target position reached.");
m_sm.PostEvent(rad::UniqueEvent(new Events::MoveDone()));
break;
}
i++;
}
}
} // namespace hellocii
7.2.1.5. Update actionMgr.cpp¶
In order to have the activity created at application start-up, the ActionMgr::CreateActivities() method has to be updated as follows:
#include "activityMoving.hpp"
...
void ActionMgr::CreateActivities(rad::Application& appl) {
rad::ThreadActivity* the_activity = nullptr;
the_activity = new ActivityMoving("ActivityMoving", appl, m_data);
AddActivity(the_activity);
}
7.2.1.6. Update testActionMgr.cpp¶
Since an new action and a new activity has been added to the ActionMgr, the unit tests for the CreateActions and CreateActivities methods should be updated accordingly.
7.3. Add Data Attributes¶
The telescope axes movement can be made more realistic by logging the intermediate telescope positions. We need therefore a way to inform the ActivityMoving about the target RA/DEC. This can be achieved by sharing the RA/DEC via the DataContext class adding the SetRaDec() and GetRaDec() methods. The DataContext::SetRaDec() method can be used by the ActionsPreset::Start() to store the target position while ActivityMoving::Run() uses the DataContext::GetRaDec() to compute the current position.
To make debugging easier, the target RA/DEC are also written in the OLDB and therefore the class OldbInterface needs also to be updated.
This behavior can be achieved by updating the following files:
update hellocii/src/oldbInterface.hpp|cpp (CII Application Module)
update hellocii/src/dataContext.hpp|cpp (CII Application Module)
update hellocii/src/actionsPreset.cpp (CII Application Module)
update hellocii/src/activityMoving.cpp (CII Application Module)
7.3.1. Update CII Application Module¶
7.3.1.1. Update oldbInterface.hpp|cpp¶
The OldbInterface class is updated with a method to write in the DB the RA and DEC attributes and the associated keys.
...
const std::string KEY_MON_TARGET_RA = "mon/target/ra";
const std::string KEY_MON_TARGET_DEC = "mon/target/dec";
const std::string KEY_MON_ACTUAL_RA = "mon/actual/ra";
const std::string KEY_MON_ACTUAL_DEC = "mon/actual/dec";
...
class OldbInterface {
public:
...
void SetTargetRaDec(const float ra, const float dec);
void SetActualRaDec(const float ra, const float dec);
...
}
...
void OldbInterface::SetTargetRaDec(const float ra, const float dec) {
RAD_TRACE(GetLogger());
SetValue<float>(KEY_MON_TARGET_RA, ra);
SetValue<float>(KEY_MON_TARGET_DEC, dec);
}
void OldbInterface::SetActualRaDec(const float ra, const float dec) {
RAD_TRACE(GetLogger());
SetValue<float>(KEY_MON_ACTUAL_RA, ra);
SetValue<float>(KEY_MON_ACTUAL_DEC, dec);
}
...
7.3.1.2. Update dataContext.hpp|cpp¶
Two member attributes, mRa and mDec, and the associated getter and setter methods are added to the DataContext class. The setter method is also for writing the new target position to the DB.
class DataContext {
public:
...
void GetTargetRaDec(float& ra, float& dec);
void SetTargetRaDec(const float ra, const float dec);
private:
...
float m_ra;
float m_dec;
};
DataContext::DataContext()
: m_oldb_async_writer(std::chrono::seconds(1), std::chrono::milliseconds(100)),
m_ra(0.0),
m_dec(0.0) {
RAD_TRACE(GetLogger());
m_oldb_async_writer.SetOldbPrefix(
m_config.GetParam<std::string>(rad::KEY_CONFIG_OLDB_URI_PREFIX) +
m_config.GetParam<std::string>(rad::KEY_CONFIG_PROCNAME) + "/");
}
void DataContext::GetTargetRaDec(float& ra, float& dec) {
RAD_TRACE(GetLogger());
ra = m_ra;
dec = m_dec;
}
void DataContext::SetTargetRaDec(const float ra, const float dec) {
RAD_TRACE(GetLogger());
m_ra = ra;
m_dec = dec;
m_oldb_interface.SetTargetRaDec(ra, dec);
}
7.3.1.3. Update actionsPreset.cpp¶
The ActionsPreset::Start() method is updated with the writing into the DataContext of the pointing target coordinates.
void ActionsPreset::Start(const rad::AnyEvent& last_event) {
auto req = rad::getPayloadNothrow< Events::Preset > (last_event);
if (req == nullptr) {
LOG4CPLUS_ERROR(GetLogger(), "Preset event has no associated request!");
return;
}
auto reqParams = req->GetRequestPayload();
float ra = reqParams->getRa();
float dec = reqParams->getDec();
LOG4CPLUS_DEBUG(GetLogger(), "Received Preset to RA " << ra << " DEC " << dec);
m_data.SetTargetRaDec(ra, dec);
req->SetReplyValue("Preset Started");
}
7.3.1.4. Update activityMoving.cpp¶
The AcitivityMoving::Run() method can be re-factored to take into account the real target coordinates and to publish to the OLDB the actual coordinates.
void ActivityMoving::Run() {
RAD_TRACE(m_logger);
/*
* Retrieve target coordinates.
*/
float target_ra = 0.0;
float target_dec = 0.0;
m_data.GetTargetRaDec(target_ra, target_dec);
int i = 0;
const int max_iterations = 10;
float cur_ra = 0.0;
float cur_dec = 0.0;
float step_ra = target_ra / max_iterations;
float step_dec = target_dec / max_iterations;
while (IsStopRequested() == false) {
/*
* Compute actual position.
*/
cur_ra = i * step_ra;
cur_dec = i * step_dec;
LOG4CPLUS_DEBUG(m_logger, "Moving ALT/AZ: RA = " << cur_ra << " DEC = " << cur_dec);
/*
* Published actual position.
*/
try {
// Update OLDB asynchronously
m_data.GetOldbAsyncWriter().Set({{KEY_MON_ACTUAL_RA, cur_ra}, {KEY_MON_ACTUAL_DEC, cur_dec}});
} catch (const std::exception& e) {
LOG4CPLUS_DEBUG(m_logger, e.what());
}
/*
* Check for preset completion.
*/
using namespace std::chrono;
std::this_thread::sleep_for(1s);
if (i == max_iterations) {
LOG4CPLUS_INFO(m_logger, "Reached target position RA = " << target_ra
<< " DEC = " << target_dec);
m_sm.PostEvent(rad::UniqueEvent(new Events::MoveDone()));
break;
}
i++;
}
}
7.3.1.5. Adding ZPB publisher to activityMoving.cpp¶
The AcitivityMoving::Run() method can be extended to publish the actual coordiates via ZPB.
void ActivityMoving::Run() {
RAD_TRACE(m_logger);
/*
* Create ZPB publisher
*/
elt::mal::Mal::Properties mal_properties;
mal_properties["zpb.ps.slowJoinerDelayMs"] =
"100"; // small initial delay to allow pub/sub synchronization
rad::cii::Publisher<hellociiif::TelPosition> publisher(
elt::mal::Uri("zpb.ps://127.0.0.1:12345/TelPosition"), mal_properties);
auto sample = publisher.CreateTopic();
if (sample == nullptr) {
LOG4CPLUS_ERROR(GetLogger(), "Instance publisher cannot create data entity");
m_sm.PostEvent(rad::UniqueEvent(new Events::MoveError()));
return;
}
/*
* Retrieve target coordinates.
*/
float target_ra = 0.0;
float target_dec = 0.0;
m_data.GetTargetRaDec(target_ra, target_dec);
int i = 0;
const int max_iterations = 10;
float cur_ra = 0.0;
float cur_dec = 0.0;
float step_ra = target_ra / max_iterations;
float step_dec = target_dec / max_iterations;
while (IsStopRequested() == false) {
/*
* Compute actual position.
*/
cur_ra = i * step_ra;
cur_dec = i * step_dec;
LOG4CPLUS_DEBUG(m_logger, "Moving ALT/AZ: RA = " << cur_ra << " DEC = " << cur_dec);
/*
* Publish the actual position.
*/
try {
// Update OLDB asynchronously
m_data.GetOldbAsyncWriter().Set({{KEY_MON_ACTUAL_RA, cur_ra}, {KEY_MON_ACTUAL_DEC, cur_dec}});
// Publish with ZPB
sample->setRa(cur_ra);
sample->setDec(cur_dec);
publisher.Publish(*sample);
} catch (const std::exception& e) {
LOG4CPLUS_DEBUG(m_logger, e.what());
}
/*
* Check for preset completion.
*/
using namespace std::chrono;
std::this_thread::sleep_for(1s);
if (i == max_iterations) {
LOG4CPLUS_INFO(m_logger, "Reached target position RA = " << target_ra
<< " DEC = " << target_dec);
m_sm.PostEvent(rad::UniqueEvent(new Events::MoveDone()));
break;
}
i++;
}
}
7.4. Building and Executing a Preset¶
The application binary can be obtained from the modified source with the following command:
> cd hello
> waf install
In order to be able to process the Preset command, the application has to be in On/Operational/Idle. This can be achieved with the following commands:
> helloCii -c config/hellocii/config.yaml -l DEBUG&
> msgsend -u zpb.rr://127.0.0.1:12081/StdCmds ::stdif::StdCmds::Init
> msgsend -u zpb.rr://127.0.0.1:12081/StdCmds ::stdif::StdCmds::Enable
> msgsend -u zpb.rr://127.0.0.1:12081/StdCmds ::stdif::StdCmds::GetState
The Preset command with the RA/DEC parameters can be sent as follows:
> msgsend -u zpb.rr://127.0.0.1:12081/PresetCmds ::hellociiif::PresetCmds::Preset '{ "ra":"10", "dec":"20" }'
> msgsend -u zpb.rr://127.0.0.1:12081/StdCmds ::stdif::StdCmds::GetState
In the stdout it should be visible from the log messages that the state has changed to On/Operational/Preset and the ActivityMoving has been started and it is simulating the telescope axes movement. The movement can be stopped by sending the Disable command:
> msgsend -u zpb.rr://127.0.0.1:12081/StdCmds ::stdif::StdCmds::Disable
The movement can be observed via the CII oldbGui panel or using a ZPB subscriber started on a dedicated terminal:
> helloCiiSub -u zpb.ps://127.0.0.1:12345 -v
8. Tutorial 3: Creating an Application with RAD + Prototype (obsolete)¶
The steps to build an application with RAD and the Prototype Software Platform are identical to the ones defined in Tutorial 1: Creating an Application with RAD + CII. The differences lie:
on the name of the templates (they do not have mal postfix),
the way the application interface is specified (see Generate Prototype Interface Module),
the RAD classes used by the application, in particular the ones related to the middleware services.
Warning
RAD still provides the templates to create application using the Prototype Software Platform however these templates will be declared obsolete as soon as the complete CII Software Platform is delivered and integrated in RAD.
8.1. Generate Prototype WAF Project¶
Similar to Generate CII WAF Project but using rad/rad/cpp/template/resource/template/rad-waftpl-prj template:
> cookiecutter rad/rad/cpp/template/resource/template/rad-waftpl-prj
project_name [hello]: hello
modules_name [helloif helloifsend hello]:
The input values to the template are:
project_name the name of the WAF project which is used to create the directory containing the project SW modules.
modules_name the name of the SW modules part of this project.
8.2. Generate Prototype Interface Module¶
All commands, replies, and topics used to communicate between ELT applications, must be specified in dedicated interface modules. The Prototype Software Platform uses Google Protocol Buffers to specify the data structures exchanged by the application via request/reply (parameters) and pub/sub (topics).
An interface module containing the “standard” commands can be created by executing the following commands and entering the requested information:
> cd hello
> cookiecutter ../rad/rad/cpp/template/resource/template/rad-cpptpl-applif
module_name [helloif]: helloif
library_name [helloif]: helloif
package_name [examples]: hello
The input values to the template are:
module_name the name of the SW module to be generated (which contains the interface specification).
library_name the name of the binary to be produced when compiling the generated module.
package_name the name of the directory that contains the module. In this case it is the project directory.
From the template Cookiecutter generates the directory helloif containing the following files:
File |
Description |
|---|---|
helloif/wscript |
WAF file to compile the SW module. |
helloif/interface/helloif/requests.proto |
Google ProtoBuf data structures. |
The requests.proto file contains the definition data structures used to send requests and replies, for example the Init command (without parameters) and the related reply (with a string parameter):
syntax = "proto3"
package helloif;
message ReqInit {
}
message RepInit {
string reply = 1;
}
The .proto files are complied by the protoc compiler which generates, in the build directory the following C++ files:
hello/build/…/helloif.pb.cpp
hello/build/…/helloif.ph.h
These files are used by the application to send/receive commands/replies. Generated files contain the C++ classes representing the data structures. These classes provide the methods to deserialize (parse) message payloads and to serialize.
The protoc compiler is invoked by waf every time you compile (and the .proto files have been modified).
8.3. Generate Prototype msgSend Module¶
A SW module implementing the msgSend tool to send the “standard” commands to applications based on Prototype Software Platform can be created by executing the following commands and entering the requested information:
> cd hello
> cookiecutter ../rad/rad/cpp/template/resource/template/rad-cpptpl-send/
interface_name [helloif]: helloif
interface_module [helloif]: helloif
module_name [helloifsend]: helloifsendhelloifsend
application_name [helloifSend]: helloifSend
parent_package_name [hello]: hello
The input values to the template are:
interface_name the name of the Prototype Interface module (which specifies the commands sent by the msgSend tool and it was defined in Generate Prototype Interface Module).
interface_module fully qualified name of Prototype Interface library.
module_name the name of the SW module to be generated (which contains the msgSend tool).
application_name the name of the binary to be produced when compiling the generated module.
parent_package_name the name of the directory that contains the tool. In this case it is the project directory.
From the template Cookiecutter generates the directory helloifsend containing the following files:
File |
Description |
|---|---|
helloifsend/wscript |
WAF file to compile the SW module. |
helloifsend/src/main.cpp |
Implementation of msgSend. |
The tool can be invoked by:
helloifSend <timeout> <IP> <port> <command> <parameters>
<timeout> reply timeout in msec
<IP> IP address
<port> port
<command> command to be sent (e.g. helloif.ReqStatus)
<parameters> parameters of the command
8.4. Generate Prototype Application Module¶
RAD provides the templates to create a simple server application implementing the standard ELT State Machine model using the Prototype Software Platform services.
A SW module implementing implementing a server application able to process the “standard” commands using ZeroMQ and ProtoBuf services can be created by executing the following commands and entering the requested information:
> cd hello
> cookiecutter ../rad/rad/cpp/template/resource/template/rad-cpptpl-appl
module_name [hello]:
application_name [hello]:
package_name [examples]: hello
interface_name [helloif]:
libs [cpp._examples.helloif]: helloif
From the template Cookiecutter generates the directory hello containing the following files:
File |
Description |
|---|---|
wscript |
WAF file to build the application. |
resource/config/config.yaml |
YAML application configuration file. |
resource/config/sm.xml |
SCXML file with the State Machine model. |
resource/config/log.properties |
Logging configuration file. |
src/events.rad.ev |
List of events processed by the application. |
src/actionMgr.[hpp|cpp] |
Class responsible for instantiating actions and activities/ |
src/actionsStd.[hpp|cpp] |
Class implementing standard action methods. |
src/config.[hpp|cpp] |
Class loading YAML configuration file. |
src/dataContext.[hpp|cpp] |
Class used to store application run-time data shared between action classes. |
src/dbInterface.[hpp|cpp] |
Class interfacing to the in-memory DB. |
src/logger.[hpp|cpp] |
Default logger definition. |
src/msgParsers.[hpp|cpp] |
Classes parsing the ZeroMQ commands/topics. |
src/main.cpp |
Application entry function. |
The generated application is very similar to the application generated for CII Software Platform (see Generate CII Application Module). Instead of getting the commands via the realization of the CII/MAL interface (`cmdsImpl.hpp`_) the “naked” ZMQ messages are parsed by the MsgParsers and TopicParsers classes defined in msgParsers.[hpp|cpp] and injected into the State Machine Engine in form of events..
8.5. Generate Prototype Integration Test Module¶
A module containing some basic integration tests to verify applications using Prototype Software Platform can be created by executing the following commands and entering the requested information:
> cd hello
> cookiecutter rad/rad/cpp/template/resource/template/rad-robtpl-test/
module_name [hellotest]: hellotest
module_to_test [hello]: hello
application_to_test [hello]: hello
interface_prefix [helloif]: helloif
application_to_send [helloifSend]: helloifSend
The input values to the template are:
module_name the name of the SW module to be generated (which contains the tests).
module_to_test the name of the SW module to test.
application_to_test the name of application to test.
interface_prefix the name of the interface module.
application_to_send the name of the msgSend application to use in the tests.
From the template Cookiecutter generates the directory hellotest containing the following files:
File |
Description |
|---|---|
hellotest/etr.yaml |
Configuration file to be able to run the tests with ETR tool. |
hellotest/src/genStdcmds.robot |
Tests verifying the “standard” commands. |
hellotest/src/genMemleaks.robot |
Similar to genStdcmds.robot tests but executed with Valgrind tool to check for memory leaks. |
hellotest/src/genUtilities.txt |
Utility functions and configuration parameters used by the tests. |
8.6. Build and Install Generated Prototype Modules¶
Generated code can be compiled and installed by executing the following commands:
> cd hello
> waf configure
> waf install
Note
Make sure that the PREFIX environment variable is set to the installation directory (which usually coincides with the INTROOT).
8.7. Prototype Applications Execution¶
In order to execute the generated application, the DB must be started first:
> redis-server
Note
It is possible to monitor the content of Redis DB via a textual client like redis-cli or a graphical one dbbrowser.
After the DB has started, the generated CII application can be executed and its current state can be queried by:
> hello -c hello/config.yaml -l DEBUG&
> helloifSend 5000 127.0.0.1 5588 helloif.ReqStatus ""
The default application command line options are as follow:
-h [ --help ] Print help messages
-n [ --proc-name ] arg Process name
-l [ --log-level ] arg Log level: ERROR, WARNING, STATE, EVENT, ACTION, INFO, DEBUG, TRACE
-c [ --config ] arg Configuration filename
-d [ --db-host ] arg In-memory DB host (ipaddr:port)
Note
Make sure that the CFGPATH environment variable contains the path(s) where the configuration files are located.
Redis IP address and port number must be either the default one (127.0.0.1:6379), or specified as command line parameter with the option -d, or defined in the DB_HOST environment variable, or defined in the application configuration file.
To terminate the application it is enough to send an Exit command or press Ctrl-C:
> helloifSend 5000 127.0.0.1 5588 helloif.ReqExit ""
8.8. Execute Prototype Integration Tests¶
Integration tests can be executed via Extensible Test Runner (ETR) tool (see ETR User Manual) or directly using Robot Framework.
In the first case:
> cd hellotest
> etr
Note
ETR may not be part of the ELT DevEnv and therefore it has be installed separately.
Using Robot directly:
> cd hellotest/src
> robot *.robot
8.9. Adding New Command¶
In order to add a new command to the application the following steps have to be performed:
Add the request and related reply in the interface module (e.g. helloif/interface/helloif/Requests.proto file)
Add the event corresponding to the request in the event definition file (e.g. hello/src/Events.rad.ev file)
Update the SCXML model with the transition dealing with the new request (e.g. hello/config/hello/sm.yaml)
Add a new method in the ActionsStd class or add a new actions class
Update the ActionsMgr class with the registration of the new action
9. Examples¶
This section contains some example applications created using RAD.
Examples are located in rad/rad/cpp/_examples/ directory.
9.1. Example Using Prototype Software Platform¶
9.1.1. exif¶
This is an example of interface module with the definition of the commands, replies, topics used by the example applications.
It contains requests.proto for the definition of the requests/replies and topics.proto for the definition of the pub/sub topics.
9.1.2. exsend¶
This is an example of how to build a utility application (similar to the VLT msgSend) able to send requests and receive replies defined in exif interface module. This application is using some RAD libraries but it is not generated from the RAD templates.
The exsend module implements the exSend application that can be used as follow:
exSend <timeout> <IP> <port> <command> <parameters>
where:
<timeout> reply timeout in msec
<IP> IP address
<port> port <command> command to be sent to the server (e.g. exif.ReqInit)
<parameters> parameters of the command
for example to query the status (with 5 sec timeout) of an application running on the same local host on port 5577:
exSend 5000 127.0.0.1 5577 exif.ReqStatus ""
9.1.3. server¶
This is an example that shows how to create RAD based applications that uses request/reply, pub/sub, timers, Linux signals. It uses the interface defined in exif interface module and can be controlled by sending the commands via the exSend application (see exsend module).
The server module has two possible configuration files and state machines:
server/config/radServer/config.yaml server/config/radServer/sm.xml
server/config/radServer/config1.yaml server/config/radServer/sm1.xml
The first configuration (config.yaml and sm.xnl) is used to instantiate a prsControl application that is able to process exif.ReqPreset commands. When a exif.ReqPreset command is received, the application executes the ActionPreset::Start action which sends a exif.ReqMove to a second application (altazControl) that simulate the movement of the axes of a telescope. While waiting for the completion of the preset, it monitors the axes position by subscribing to topic XYMeas topic published on port 5560. The topic is processed by the XYMeas topic is processed by the ActionPreset::Monitor action. See the picture below for a more complete overview of the behaviour of prsControl application.
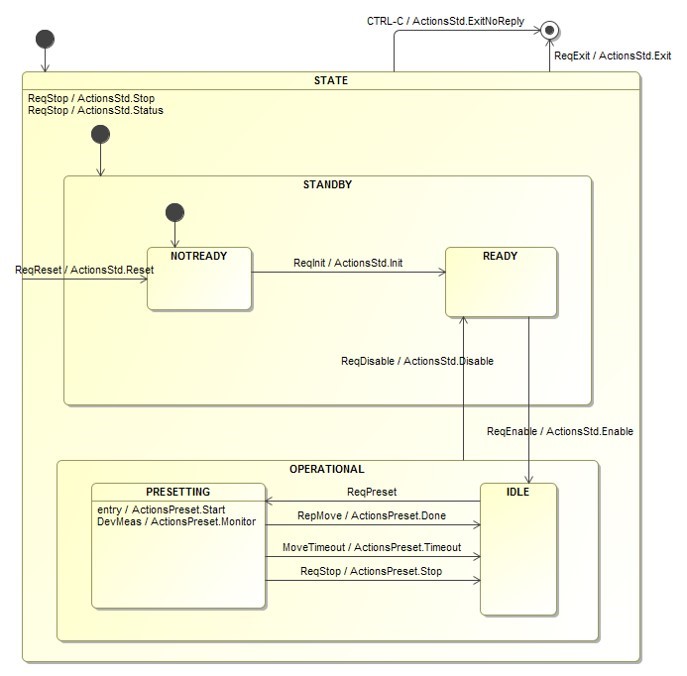
The second application (altazControl) is configured using config1.yaml and sm1.xml files. It receives the exif.ReqMove command and executes the ActionsMove::Start action and starts a do-activity: the ActivityMoving thread. The thread simulates the movement of the axes and publishes the intermediate positions via the XYMeas topic. When the target position is reached, the do-activity terminates and a reply (exif.RepMove) to the originator of the exif.ReqMove command is sent by the ActionsMove::Done action. See the picture below for a more complete overview of the behaviour of prsControl application. See the picture below for a more complete overview of the behaviour of altazControl application.
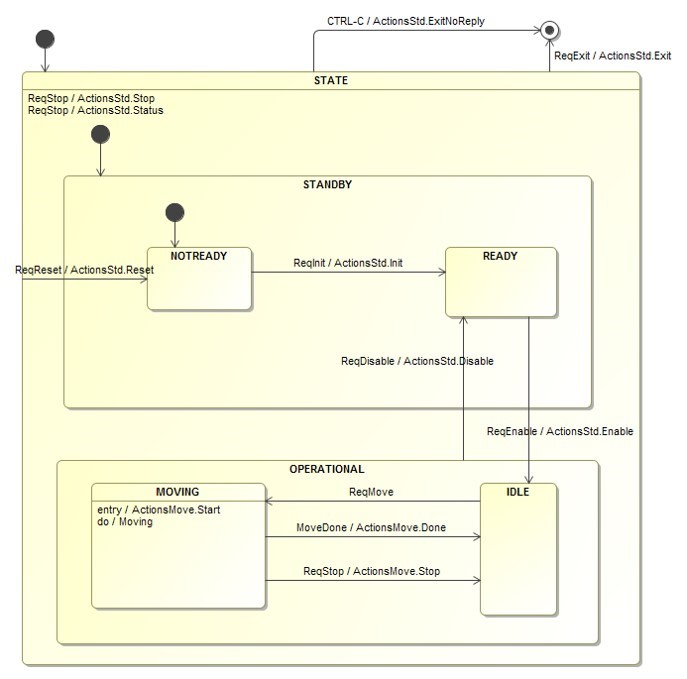
Note that both applications store the configuration, status, and telescope position information in the Redis runtime DB.
The sequence of messages to initialize, enable, and start the preset is shown below.
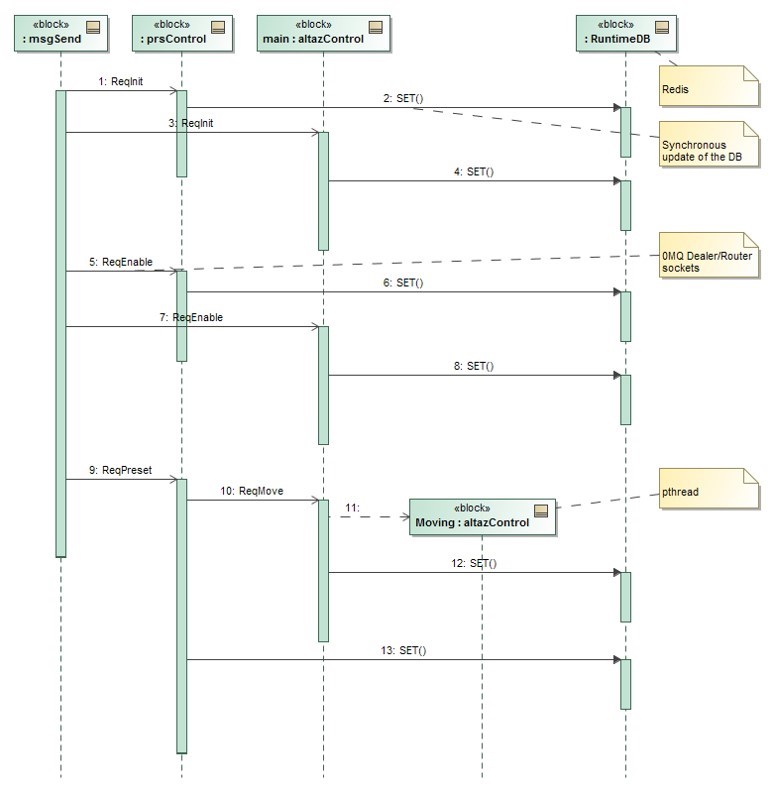
The sequence of messages to preset the axes is shown below.

In order to run the server example refer to the RAD integration test section.
9.1.4. hellorad + server¶
This is an example that shows how a Python client can talk to a C++ server. The client sends a ReqTest request containing “Ping pong” text, the server receives the requests and replies with a RepTest reply. To run the example first start the server:
radServer -c radServer/config.yaml -l DEBUG &
and the start the client:
hellorad client --req-endpoint='tcp://localhost:5577'
9.2. Example Using CII Software Platform¶
9.2.1. exmalif¶
This is the porting of exif interface definition using CII MAL XML language.
9.2.2. exmalsend¶
This tool is similar to exsend and allows to send the commands specified in exmalif to a CII server (see exmalsever below) implementing the exmalif interface.
It shows how to send synchronous CII/MAL/ZPB requests and get the related replies.
9.2.3. exmalserver¶
This is the porting of the server example application to CII.
It shows how to implement a server that is able to:
reply asynchronously to commands including error replies and partial replies.
send commands synchronously and get replies asynchronously.
publish topics and subscribe to topics.